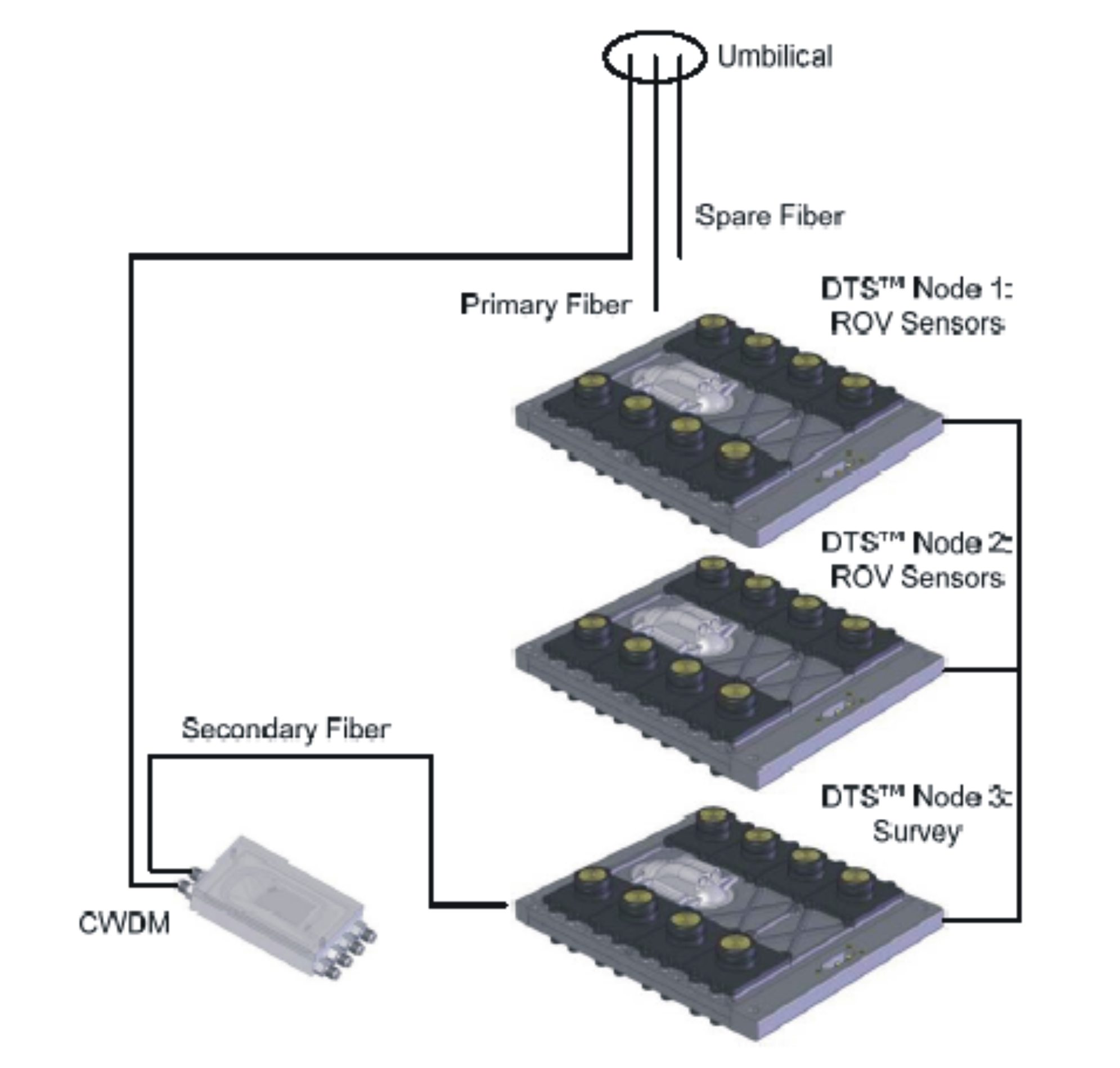
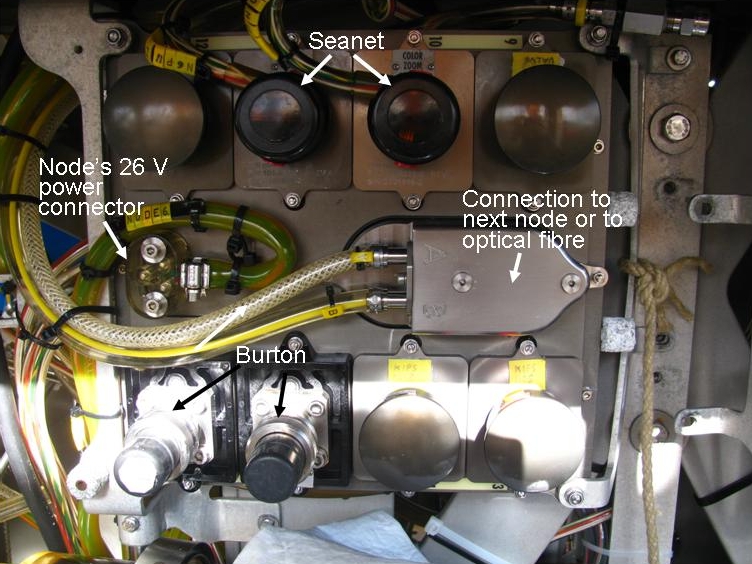
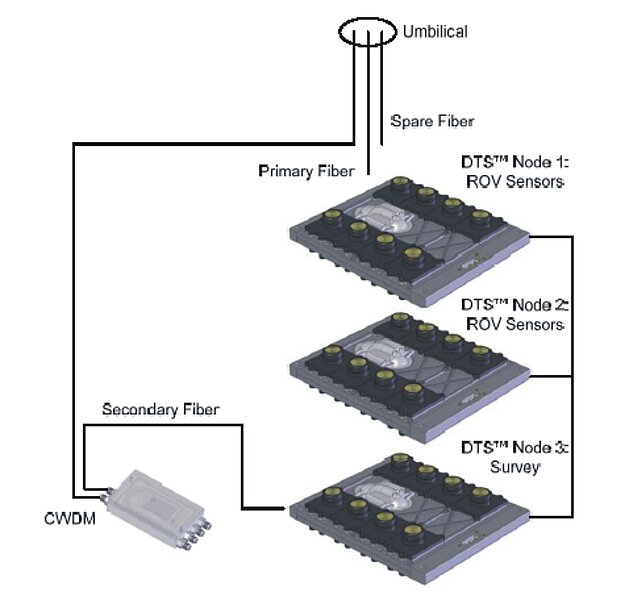
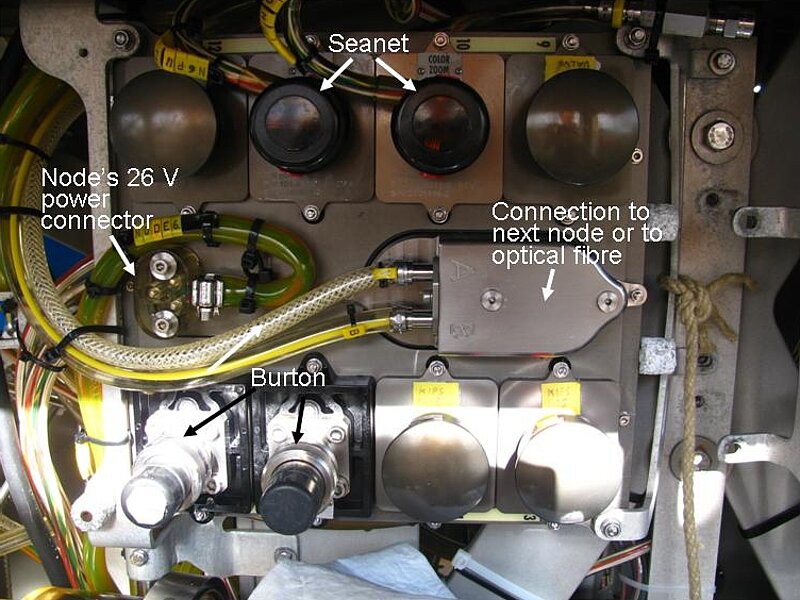
The main components of the digital telemetry system (DTS™) of Schilling Robotics are so-called communication nodes. Each node is a 16-port module to connect, for instance, cameras and other sensors. Each node also houses two Gbit connections for the topside communication and as connection to the next subsea node.
Each node may be configured individually as:
- serial: RS232 / RS485
- video: PAL / NTSC @ 30 fps and D1 resolution
- ethernet: 10 / 100 Mbps
ROV KIEL 6000 uses 4 subsea nodes with 64 ports in total. 40 ports are used for ROV operations and sensors while 24 ports may be used for additional scientific instruments. Each port module provides 26 VDC with 250 W power.
The connectors used are either SeaNet connectors (pressure compensated) or 8-pin Burton connectors (“feed-through”).
Controls - Control Van
All system components necessary to operate the vehicle and to receive video and data streams are located in the 20'-ISO control container.
The network consists of a real-time computer for controlling the ROV, a server to control the ethernet between real-time and two client computers for the pilot and co-pilot with duplicated Graphical User Interfaces (GUI) and touch-screens. Optionally, more computers may be integrated into the ethernet.
For overall control, Schilling's deeveloped the 'Remote System Engine' RSE™ . Additionally, the software facilitates the management of system diagnosis, alarms and intervention capabilities in case of malfunction. It also provides an extended event logging.
Besides the two control touch-screens, all visual observations, provided by the cameras, are displayed on 24" flat screens. System information, e.g. heading and depth, can be integrated as an overlay.
All ROV-system and scientific data are stored in a time-referenced data base . This includes the video streams of the standard working cameras and selected sequences of the HDTV camera and still photographs.
Details
- 20' ISO container with air condition
- 2 workplaces for pilots including control pucks, touch screens and master for the Orion manipulator
- 2 workplaces for scientists, including a protocol PC
- 5 flat screens 24" (TFT, full HD), displaying all available video streams
- 3 monitors for display of sonar-, navigation- and database
- video switcher matrix (32 x 32)
- video-overlay-system for display of ROV data (e.g. heading, depth, time, date, compass, project information etc.)
- realtime data base
- OFOP navigation and logging software (SAMS, J. Greinert)
- ProxSys Asset-Managementsystem (Como GmbH)
- "Final Cut Studio"

{kind=link}
{kind=link}