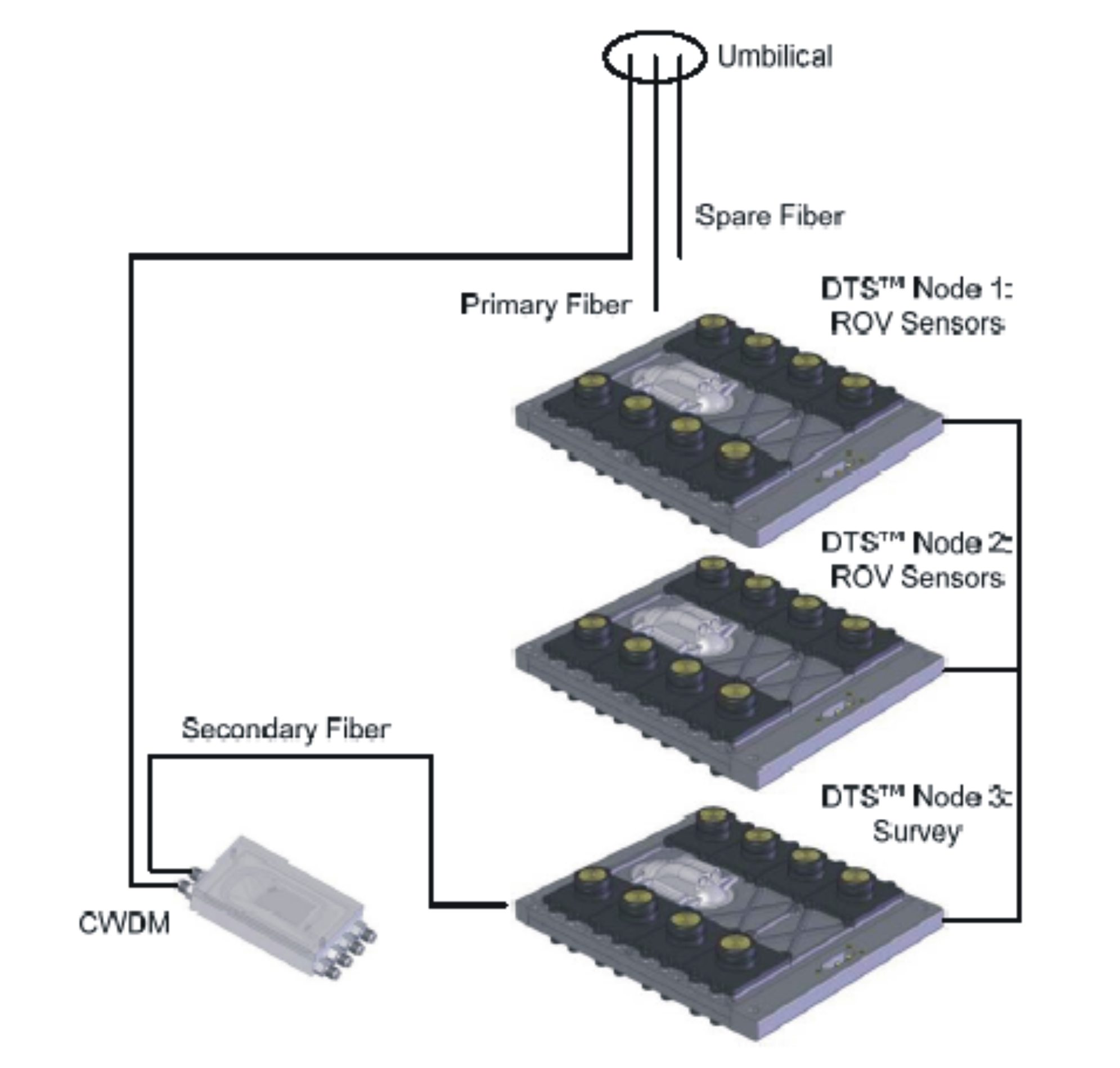
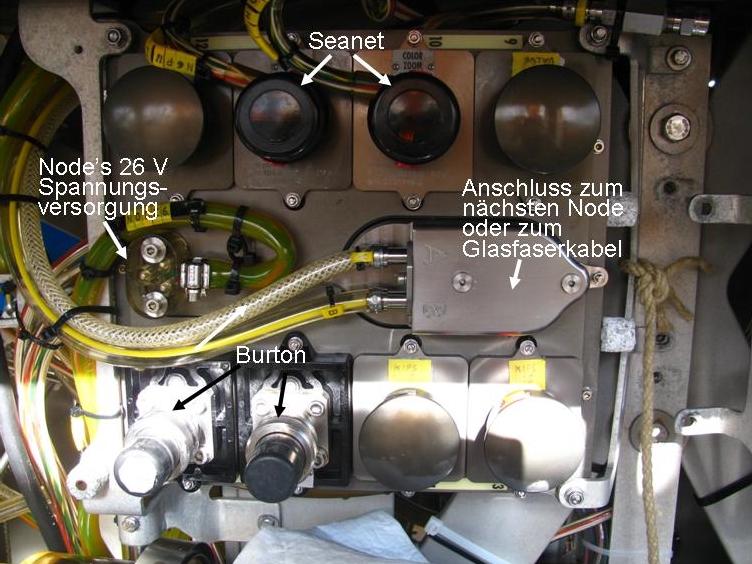
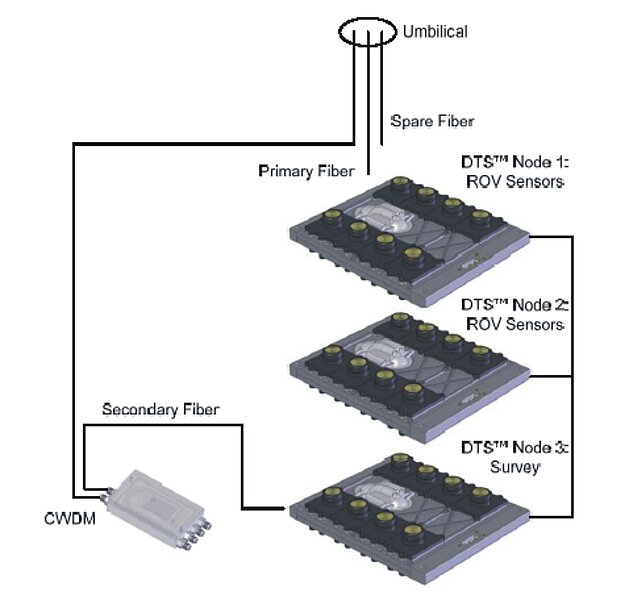
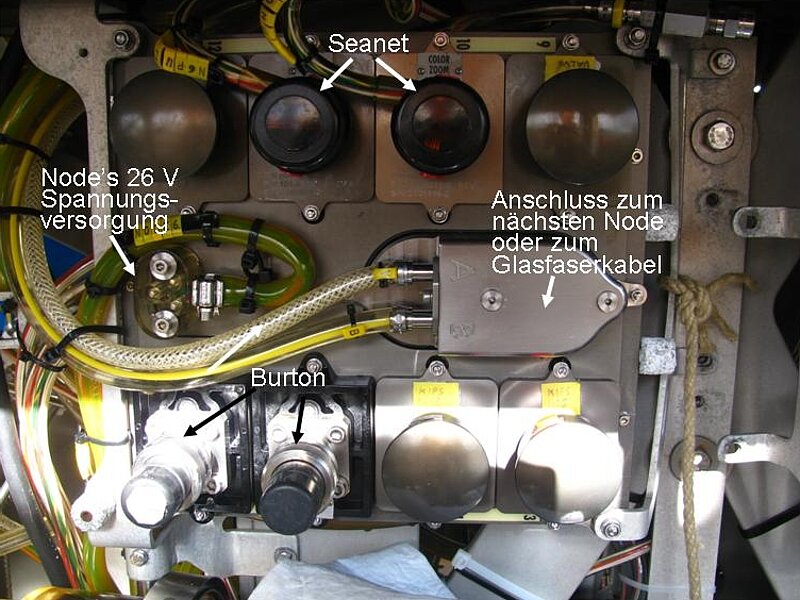
Das digitale Telemetriesystem (DTS™) von Schilling Robotics besteht aus sogenannten "communication nodes". Jeder Node enthält 16 Anschlüsse (Ports) sowie zwei zentrale Gigabitanschlüsse, über die der Node entweder über das Glasfaserkabel mit Oberflächen Nodes verbunden oder mit weiteren Subsea Nodes in Reihe geschaltet werden kann.
Jeder Anschluss kann individuell konfiguriert werden:
- seriell: RS232 / RS485
- Video: PAL / NTSC @ 30 fps und D1 Auflösung
- Ethernet: 10 / 100 Mbps
Jeder Anschluss bietet 250 W Leistung und kann 26 VDC von der ROV-Energieversorgung auf angeschlossene Geräte übertragen.
ROV KIEL 6000 verfügt über 4 Subsea Nodes mit insgesamt 64 Ports. Davon werden 40 für das ROV verwendet, 24 stehen für zusätzliche wissenschaftliche Geräte zur Verfügung.
Es werden entweder SeaNet-Stecker (druckkompensiert, d.h. Stecker und Anschlusskabel sind in Kompensationsöl eingebettet - sogenannte "flow-through"-Stecker) oder 8 pin- Burton-Stecker (nicht druckkompensiert, sogenannte "feed-through"-Stecker) verwendet.
Steuerung - Kontrollcontainer
Im 20’-ISO-Kontrollcontainer sind alle Systemkomponenten zur Steuerung des ROVs untergerbacht.
Das Computernetzwerk besteht aus einem Realtime-Computer zur Steuerung des ROVs, einem Server zur Steuerung der Kommunikation zwischen Realtime-Computer und zwei Client-Computern für den Piloten und Copiloten mit duplizierten Graphical User Interfaces und Touchscreens. Es können beliebig viele weitere PCs in das Ethernet-Netzwerk eingebunden werden.
Zur Steuerung dess ROVs wird eine von Schilling Robotics entwickelte Software (Remote System Engine, RSE) verwendet, die u.a. Software Alarme, Diagnose- und Eingriffsmöglichkeiten bei Systemfehlern oder anderen Problemen während des Einsatzes, sowie ein Eventlogging ermöglicht.
Alle System- sowie wissenschaftlichen Daten werden in einer Datenbank zeitreferenziert gespeichert. Dazu zählen ebenso alle Aufnahmen der zwei Arbeitskameras als auch ausgesuchte HDTV Aufnahmen sowie digitale Fotos.
Details
- 20' Kontrollcontainer, klimatisiert
- zwei Pilotenarbeitsplätze mit Steuerkonsole und Touchscreens
- zwei wissenschaftliche Arbeitsplätze
- fünf 24" Flachbildschirme (TFT, HDTV-geeignet) zur Darstellung aller verfügbarer Videostreams
- drei Bildschirme für Sonar-, Datenbank- und Navigationsanzeigen
- Video-Overlay-System für die Anzeige von ROV-Daten (Heading, Tiefe, Zeit, Datum, Kompassrose, Projektinformationen etc.)
- Echtzeitdatenbank
- OFOP Navigations- und Protokollierungssoftware (SAMS, J. Greinert)
- ProxSys Asset-Managementsystem (Como GmbH)
- Final Cut Studio-Arbeitsplatz

{kind=link}
{kind=link}