

Artificial Intelligence under the Sea
Tests for an autonomous measurement network in Eckernförde Bay
Anyone who is travelling around Eckernförde Bay in the coming weeks might be able to spot the research vessel ALKOR on the water. Scientists of the GEOMAR Helmholtz Centre for Ocean Research Kiel will set up an autonomous robotic measurement network and test its functions around the long-term observation station Boknis Eck. The aim of the expedition is to show how the various instruments can communicate with each other and react to current and upcoming environmental changes.
The expedition is scheduled for eleven days: Initially, the team needs three days to set up and test all stations of the measurement network. Then the network will work independently for almost seven days before it is dismantled again on the last day. “We will also feed current weather data and the data from the Boknis Eck long-term observation station into the system to improve the environmental analysis of the network. The self-measured and added data should then enable the monitoring network to analyze and predict environmental changes and act accordingly”, explains Dr Stefan Sommer, chief scientist of the expedition: “For example, depending on the environmental conditions, the route of an underwater vehicle can change or certain predefined measurements will be carried out.”
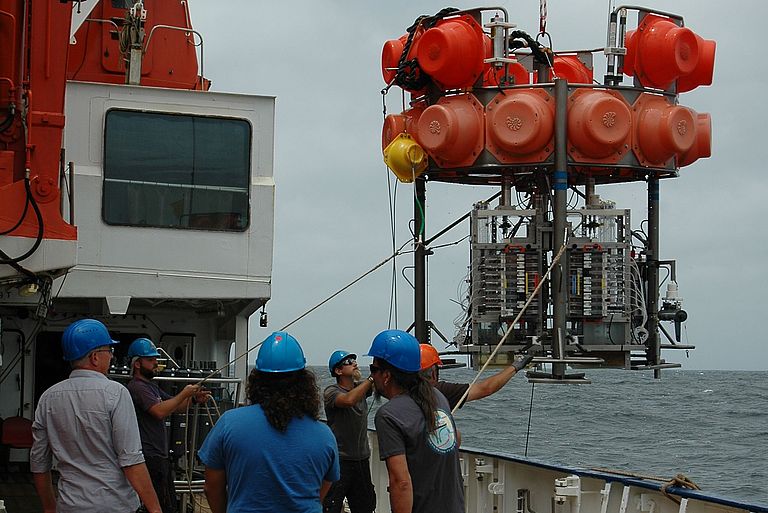
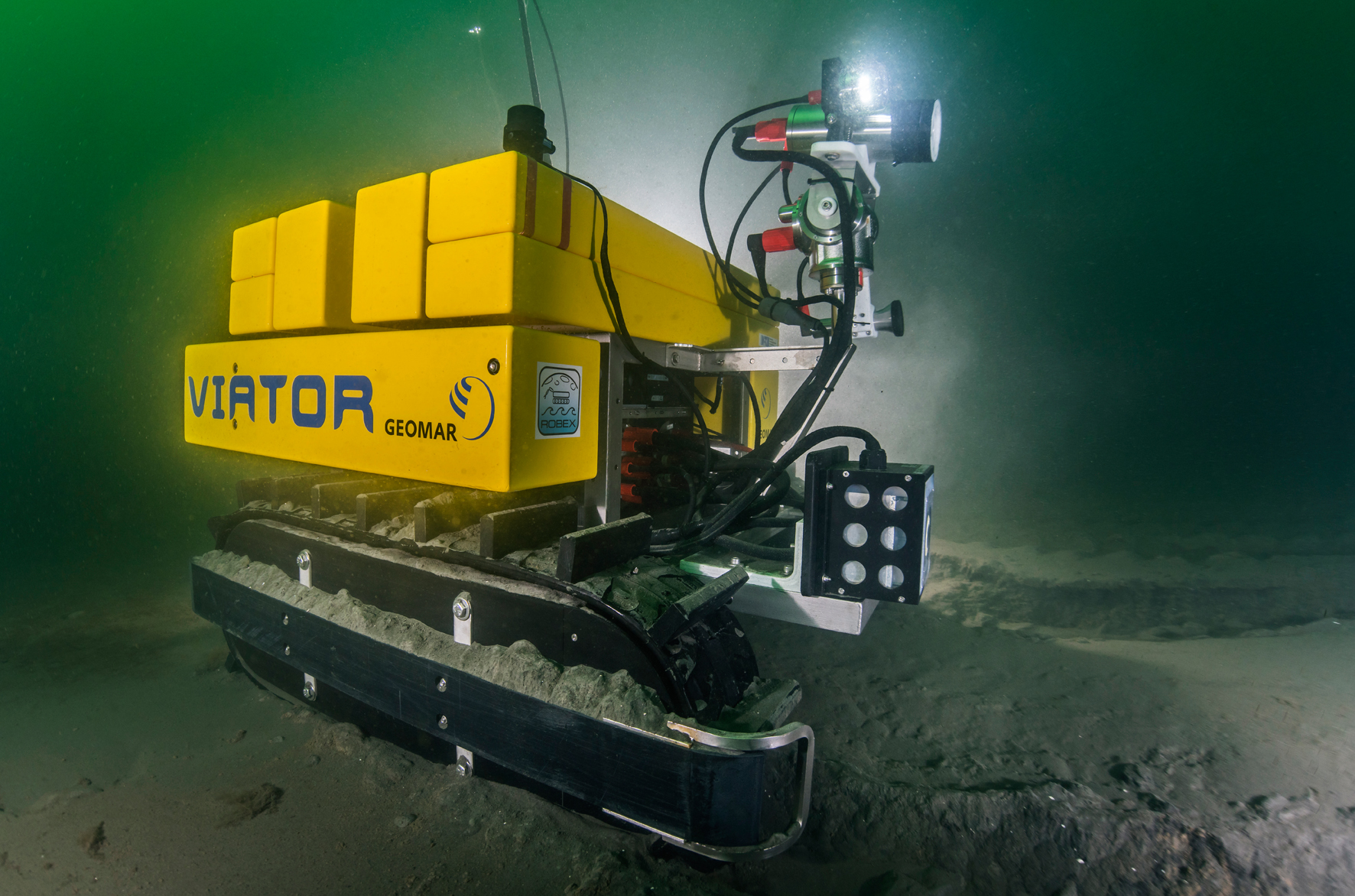
In total, the network consists of four stationary and three mobile elements. One of them is, for example, the underwater vehicle VIATOR: This so-called crawler can move autonomously on the seafloor and explore it with the help of a camera system and a laser scanner. A buoy equippend with a wireless network, which is connected to the crawler, transfers the collected data to RV ALKOR. One of the stationary devices on the seafloor serves as a hangar for VIATOR: the underwater vehicle can park there completely independently if a mission is completed. Also part of the network is a camera system, which is towed to the ship.
The instruments are equipped with various sensors to measure for example oxygen content, temperature or currents. For this reason, the individual stations of the measurement network are used not only for technical tests but also to collect data for the analysis of oxygen variations in the Eckernförder Bucht. Despite being close to the coast, the crew will remain on board the ALKOR during the entire expedition. This is partly due to the hygiene regulations for the trip, but also due to the tight schedule of the expedition.
Background:
The expedition is part of the Helmholtz project ARCHES, in which autonomous and networked robotic systems for marine and planetary environmental exploration are being developed jointly since 2018. Besides GEOMAR, the German Aerospace Center (DLR) (Coordinator), the Alfred Wegener Institute (AWI) and the Karlsruhe Institute of Technology (KIT) are involved in the project. It was supposed to end with the departure of the ALKOR, but due to the current situation it was extended until 2021, so that further tests are possible next year.