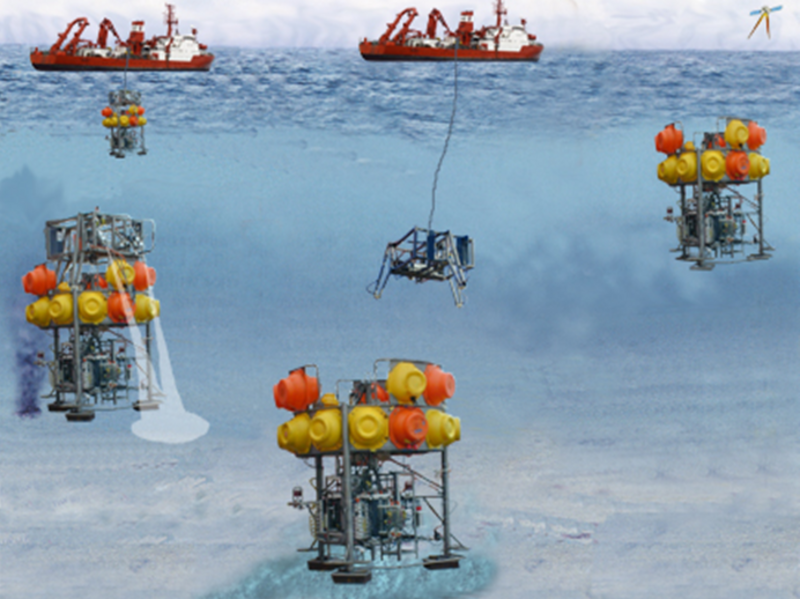
Landers are used as platforms for various in situ measurements at the seafloor; their specific payload or scientific module is determined by the scientific measurement or experiment. They are typically deployed in the conventional free-fall mode, where the lander is released from the vessel at the sea surface. However, many scientific objectives addressing specific morphological features, such as cold seeps, mud volcanoes or particular benthic communities require a targeted and soft lander deployment. For these requirements a special launching device connected to the ship’s coaxial or hybrid fibre optical cable was developed. This launcher carries the telemetry, cameras, lights and an electric release to separate the lander from the launcher instantaneously.
Once the lander has finished the measurements, the weights are released after acoustic command, and the lander ascends to the surface by its floatation. At present we use the following lander configurations.
Biogeochemical Observatory (BIGO)
BIGO is used to measure in situ fluxes and biogeochemical turnover at the seafloor and contains two circular flux chambers (internal diameter 28.8 cm, area 651.4 cm2). Several hoursafter the observatory is placed on the sea floor the chambers are slowly driven into the sediment. During this initial time period where the bottom of the chambers is not closed by the sediment, the water inside the flux chamber is periodically replaced with ambient bottom water. The water body inside the chamber is once further replaced with ambient bottom water after the chamber has been driven into the sediment to flush out solutes that might have been released from the sediment during chamber insertion.
To trace fluxes of e.g. methane, O2, NO3-, NO2-, NH4+, and other solutes8 sequential water samples are taken from inside each benthic chamber by means of glass syringe water samplers. The syringes are connected to the chamber using 1 m long Vygon tubes. To monitor the ambient bottom water an additional syringe water sampler (hosting 8 glass syringes) is employed.
Alternatively, for the gas analysis of e.g. pCO2, N2, and Ar 4 water samples are taken from inside each benthic chamber using a peristaltic pump which slowly filled glass tubes instead of the glass syringes. To monitor the ambient bottom water another series of four glass tubes are used.
O2 is measured inside the chambers and in the ambient sea water using optodes (Aandera) that are calibrated before each lander deployment. During the BIGO deployment the sediments are retrieved for latter biogeochemical pore water and solid phase analyses, biological as well as microbiological studies.
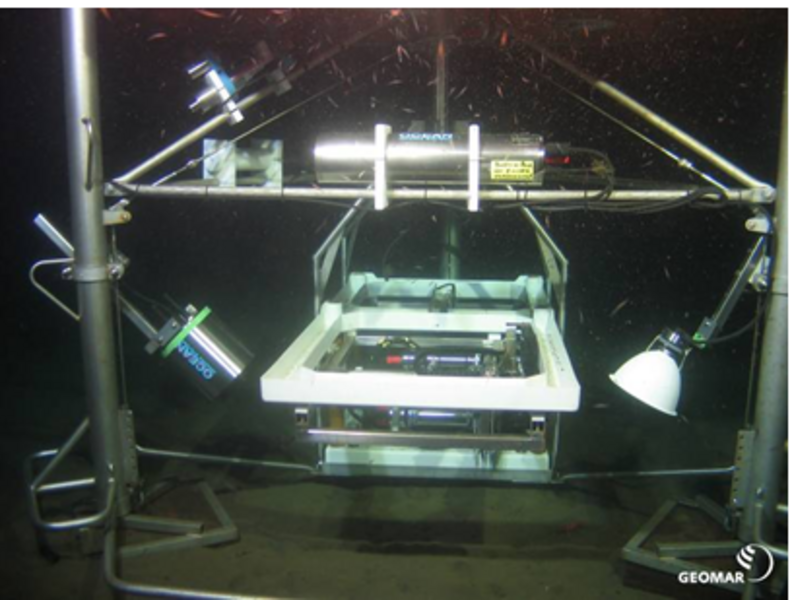
Profiler Lander (PRFL)
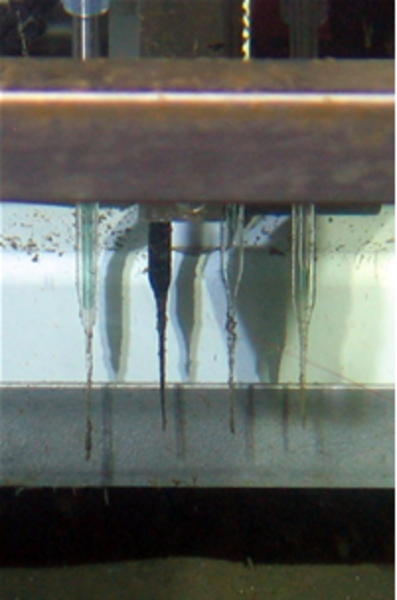
The profiling unit consists of a lower and upper glass fibre frame, which are connected by four glass fibre poles. The upper frame extends about 50 cm towards the front defining the area across which sensors can be moved in mm increments along the x and the y axis. Along the vertical z axis, the sensors can be moved freely selectable increments. The rear part contains pressure housings for data logging, for the control unit controlling the movements of the sensors, and batteries. For the deployment the profiling unit is mounted into a lander frame but can be also used as single module during ROV deployments. Commercially available oxygen, sulfide and pH sensors are used to measure in-situ micro-profiles across the sediment water interface. Two optodes, one mounted at the same height as the micro-sensors, the second one mounted in ~ 1 m above the seafloor recorded time series of O2 and temperature in the bottom water.
In addition to the profiling unit during deployment the lander can host an upward looking ADCP (300 KHz, sentinel, RDI), a camera system (Ocean imaging system) taking image series of the sediment surface, as well as an storage CTD (RBR). Furthermore, a downward looking Aquadopp Profiler (2 MHz, Nortek) can be installed to measure currents close to the bottom. During some deployments this lander hosts an Eddy Correlation module which can be swinged out once the lander is placed on the sea floor.
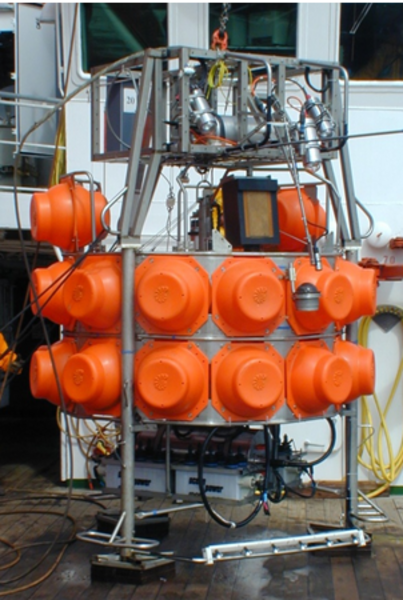
GasQuant Lander (GQL)
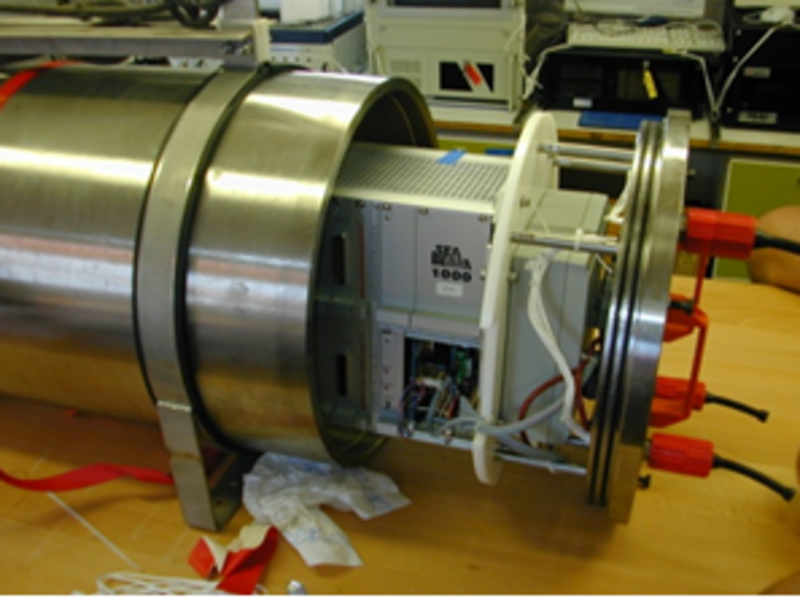
To quantify the volume discharged through bubbles, a hydroacoustic system has been developed in close cooperation with ELAC-Nautik in Kiel. This system is based on a 'normal' but pressure resistant swath bathymetry transducer that looks horizontally and detects bubbles due to the backscattered acoustic signal. It is deployed by a lander and can be accurately placed in front of known bubble sites to monitor the exact number and position of vents within 2075 m2as well as the periodicity of gas rising from the seafloor for more than one week.
GasQuant is an autonomous system composed of a pressure resistant (100 bar) 180 kHz swath transducer (75° opening angle with 21 beams; resolution of each beam 3° horizontal and 1.5° vertical), an electronic transducer unit (SEE 30; Transmitting and Receiving Unit), a data acquisition PC, and four deep sea batteries for power supply. The transducer is fixed in a frame at the upper buoyancy circle of the lander. The SEE 30 and the data acquisition PC are both stored in a titanium barrel that is fixed at the tool-frame of the lander. The four deep-sea batteries with 230 Ah and 12 V each are fixed beside this titanium barrel. The SEE 30 is modified to run with batteries in a low power mode. The data acquisition PC is a common micro-computer (Windows NT), which controls the system and records the data via the Hydrostar Online software of ELAC-Nautik. Special software was written to restart the computer and the entire system if the PC crashes or the SEE stops unnoticed.


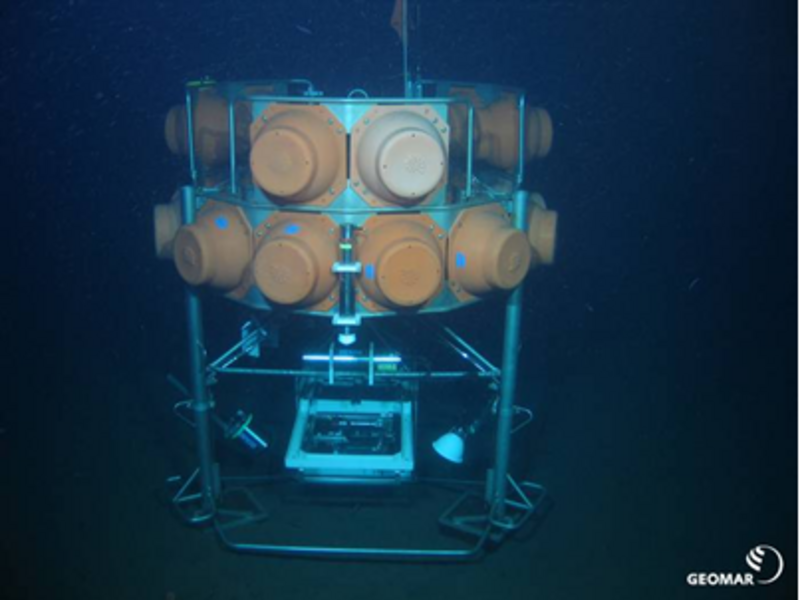
. The picture is taken by ROV Kiel 6000 during deployment off Chile.")
. The picture is taken by ROV Kiel 6000 during deployment off Chile.")
. The picture is taken by ROV Kiel 6000 during deployment off Chile.")



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}