Oceanic Machine Vision Group



The Oceanic Machine Vision Group focusses on underwater computer vision research, to facilitate measuring, mapping and monitoring in the oceans and next generation robotic applications. The group is funded through the Emmy Noether Programme of the German Research Foundation (DFG) and co-organized the Computer Vision in the Ocean Workshop at ICCV-2021.
The majority of Earth's surface is covered by several kilometers of water and due to difficult visibility conditions underwater cameras have to come close to the seafloor to see it. Because of the hostile conditions of extremely high pressure, cold temperatures and no light, we have to send camera-equipped robots like remotely operated vehicles (ROV) or autonomous underwater vehicles (AUV) to photograph the seafloor. Consequently, more than half of the Earth's surface have not been seen by any human and have not been photographed. Our goals are to improve geometric and radiometric machine vision and to enable in particular AUVs to use cameras as measurement and navigation devices.
Currently, underwater vision cannot use its full potential because of refraction, scattering and attenuation as well as bad visibility conditions and very limited localization (no GPS). Refraction occurs when light rays pass an interface of two media with two optical densities, e.g. when light reflected from objects in the water enters the camera housing. Light rays then change their direction. If this is not considered properly, measurements in images become invalid. We look at mathematical models and practical calibration techniques that can be used with different optical configurations, such as dome ports and flat ports. Another key concept in machine vision is to identify the same 3D point in multiple images. Such correspondence search is substantially complicated by underwater light cones, and the interaction of light and water. Parts of the light are absorped by the water, in particular the yellow-red range of the visible spectrum, leading to greenish or blueish appearance of underwater images. On top, photons can be scattered, which reduces the image contrast by adding a fog-like effect onto the images. These effects increase with distance, which makes it extremely challenging to identify a location from another perspective or distance. Earlier color restoration research has so far mostly focussed on shallow water with sunlight, whereas our robots are exploring the deep sea like with a torch light in the (foggy) night.
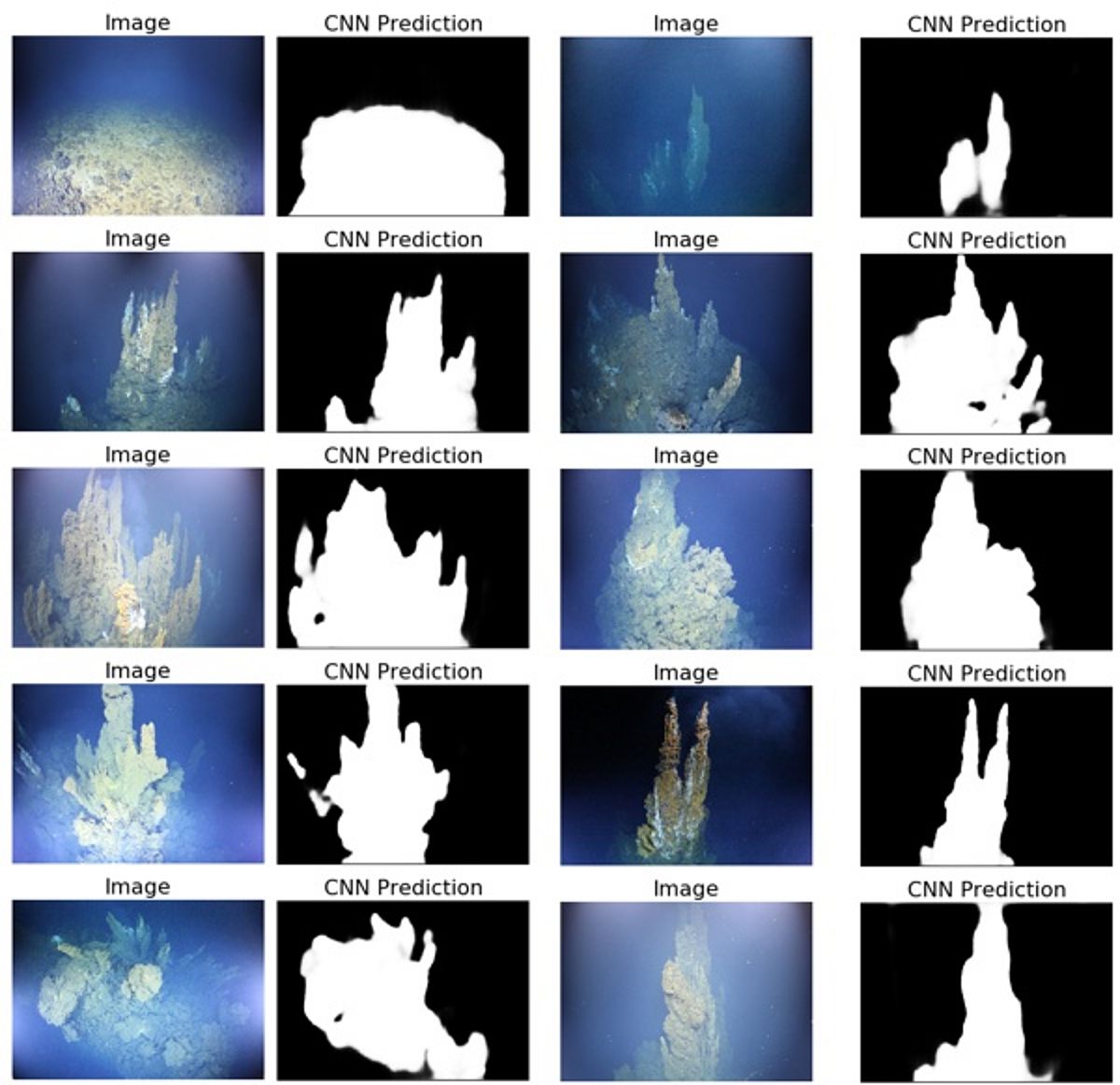
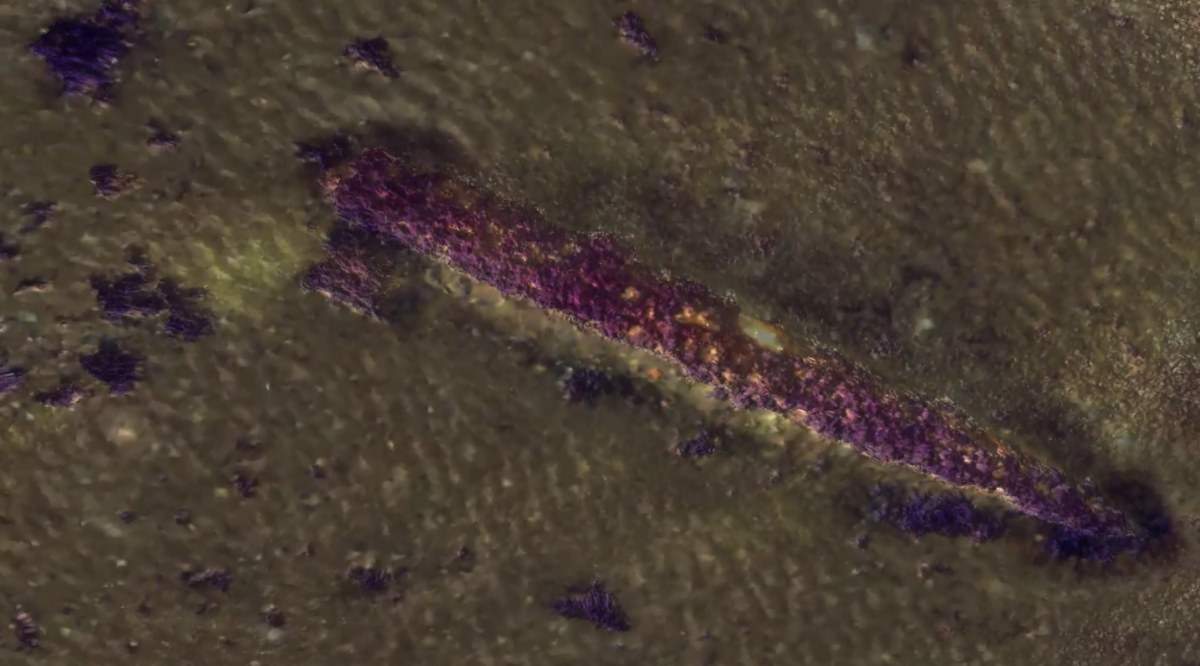
Only if these issues are under control, cameras can be used as underwater measurement devices. With these, we can map the seafloor to generate large scale 2D and 3D maps of how the ocean floor would look without optical water effects, enabling geological and biological interpretation. It also allows for monitoring and identifying changes over time and to detect, quantify and analyse processes, habitats or geological structures, or the hundred thousands tons of disposed world war munitions that have been rusting in various seas for decades. Recent efforts to mine deep sea reources raise questions about the impact, for which optical methods are an ideal monitoring instrument.
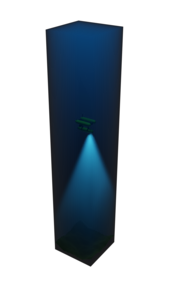
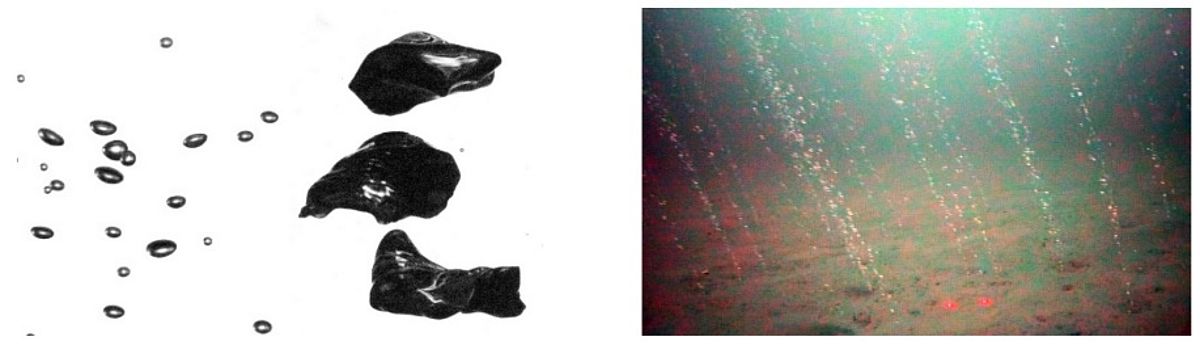
We are also interested in machine vision in the water column and to simulate underwater light propagation in general. The water column of the open ocean is the largest living space on Earth with much to explore. Plankton can serve as an essential ocean variable that can inform us about the state of the ocean but there are many other phenomena to be observed by cameras. Rising gas bubbles can originate from natural reservoirs, but also from abandoned oil or gas drill sites. Characterizing gas flow helps to estimate marine contributions to carbon budgets, or to monitor future subsea carbon storage technologies.
While being rooted in computer science, the group operates at the interface of computer vision, geometry, machine learning, photogrammetry, robotics, optics, computer graphics, artificial intelligence and marine data sciences and develops rigorous and mathematically well-founded methods for next generation ocean science.
Different exemplary illumination scenarios in the water column