





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Lab lead:
Dr. Tom Kwasnitschka
GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel
Wischhofstr. 1-3, Geb. 8e, Raum 213
24148 Kiel
Tel.: 0431 600-2136
Fax: 0431 600-2924
E-mail: tkwasnitschka(at)geomar.de

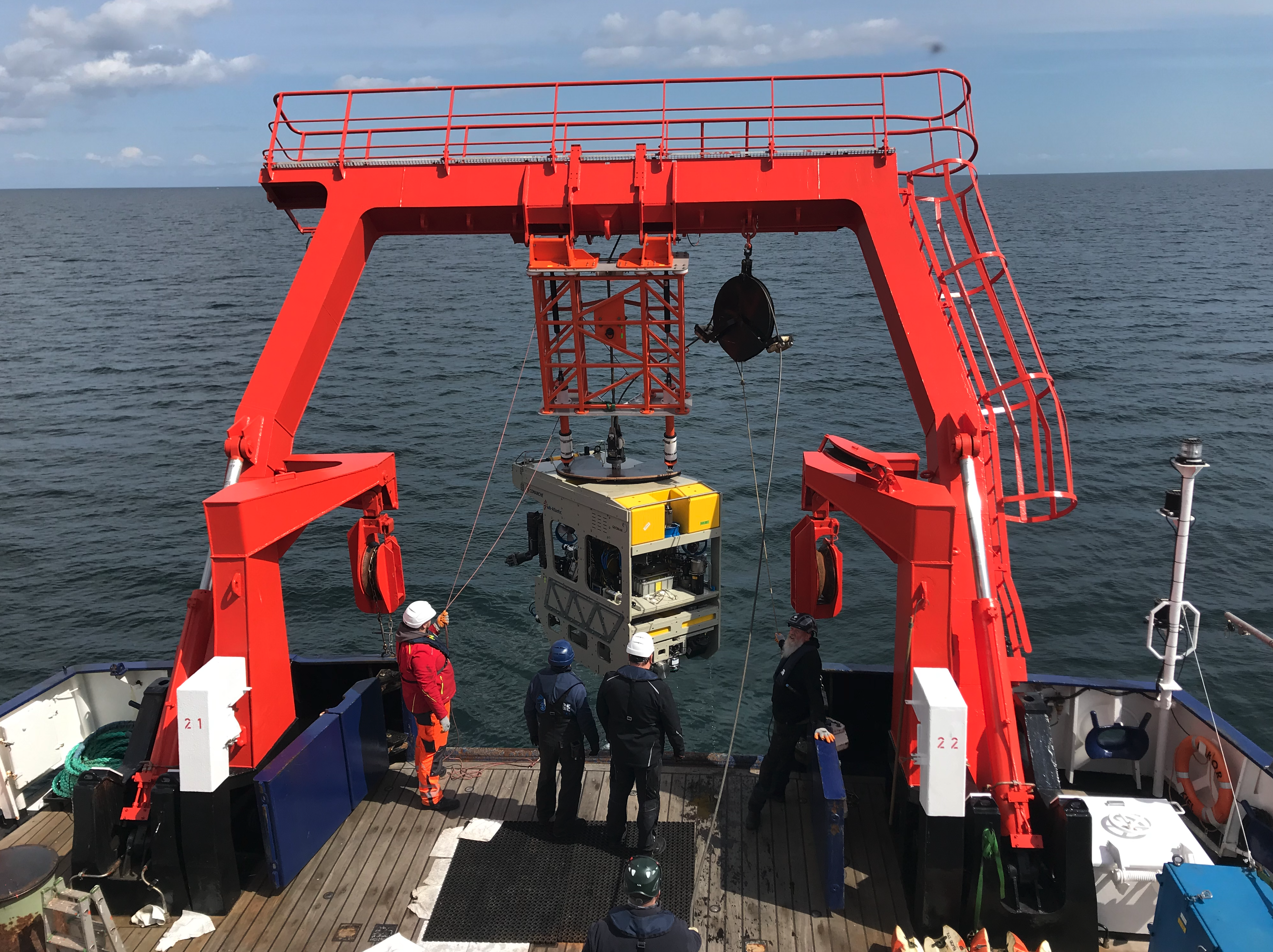
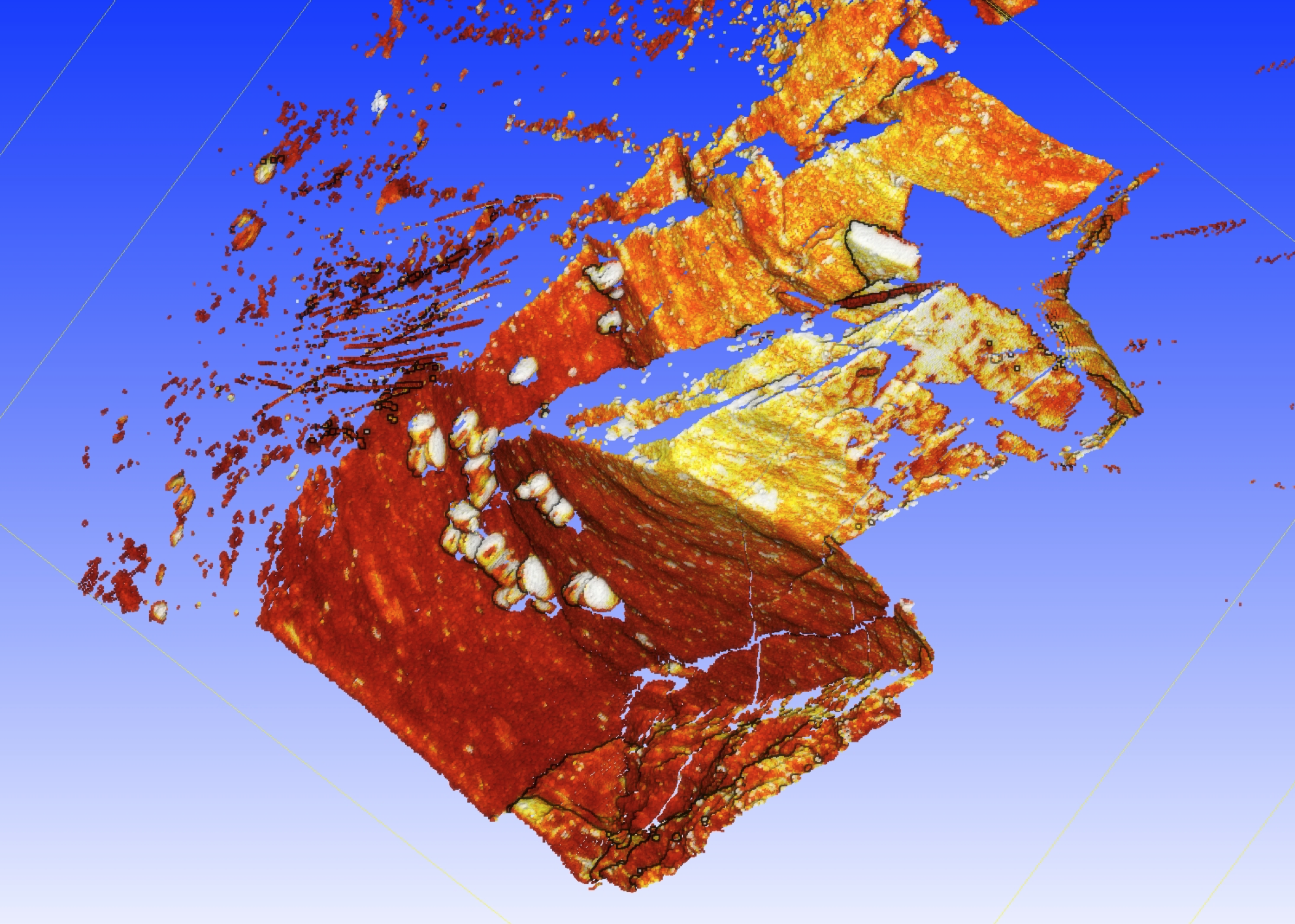
Robotic seafloor exploration has a visualization problem: The environment in wich the remotely operated vehicle (ROV, AUV) is to maneuver must be mapped in real time, for navigation purposes as well as for scientific research.
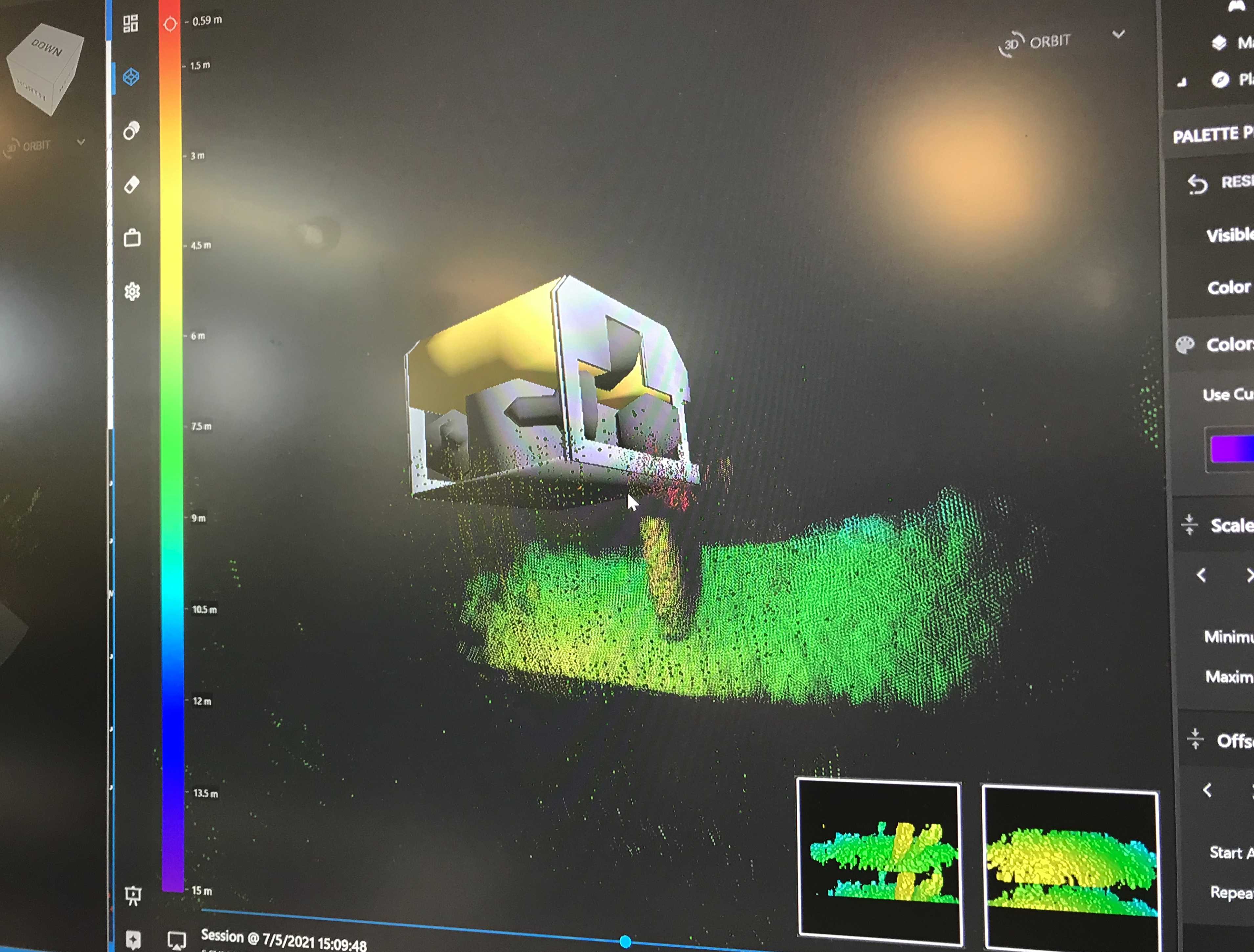
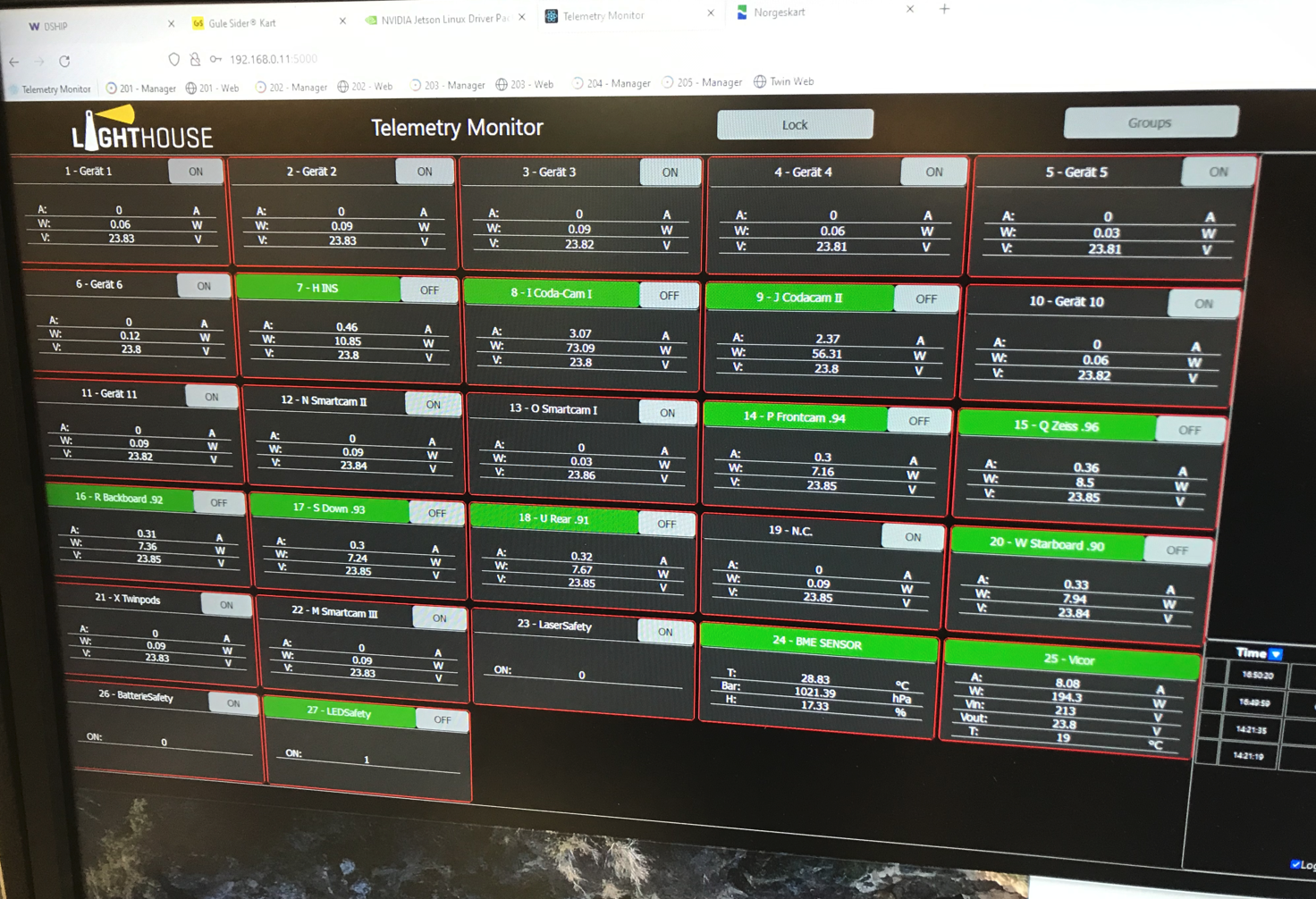
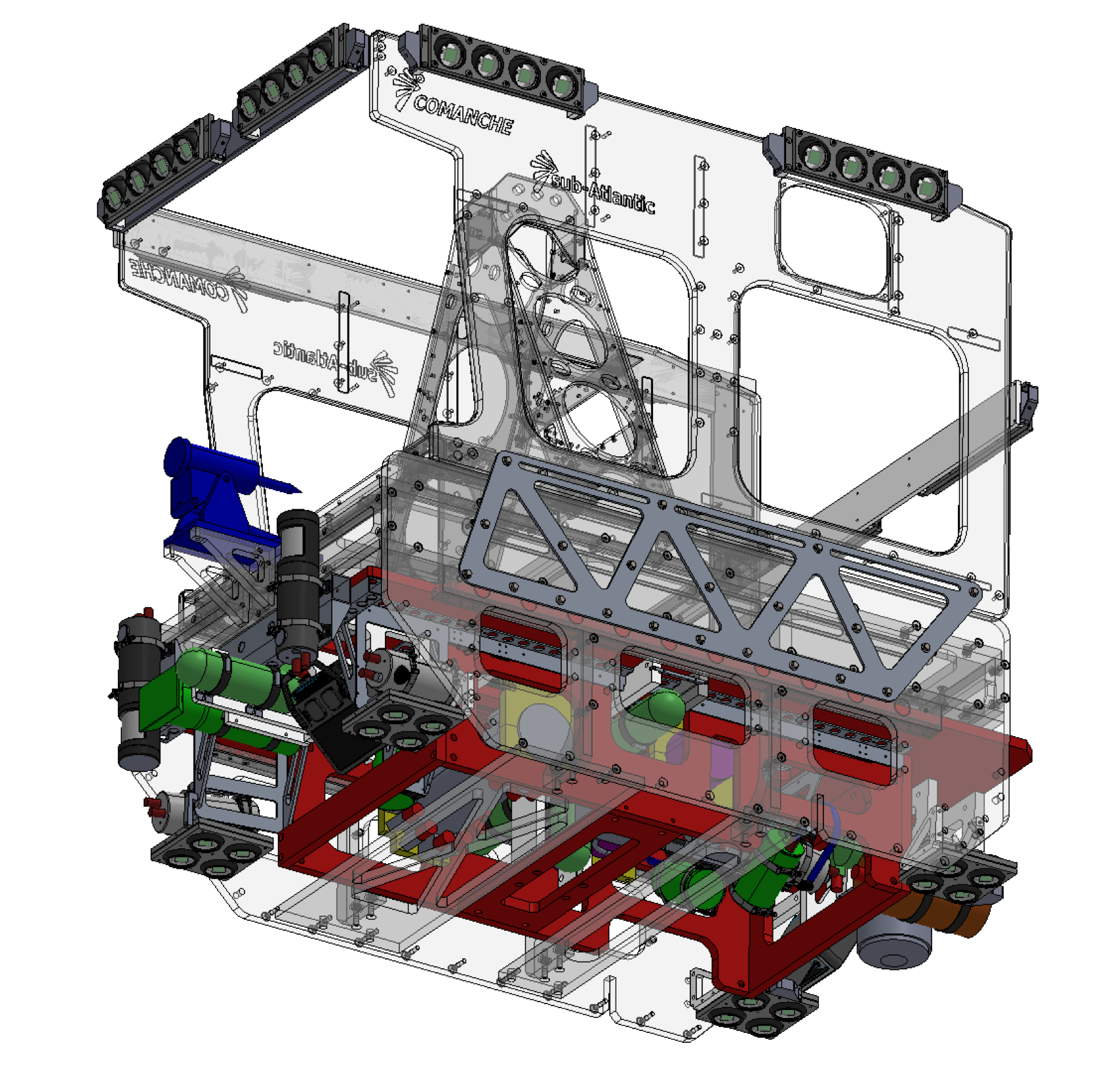
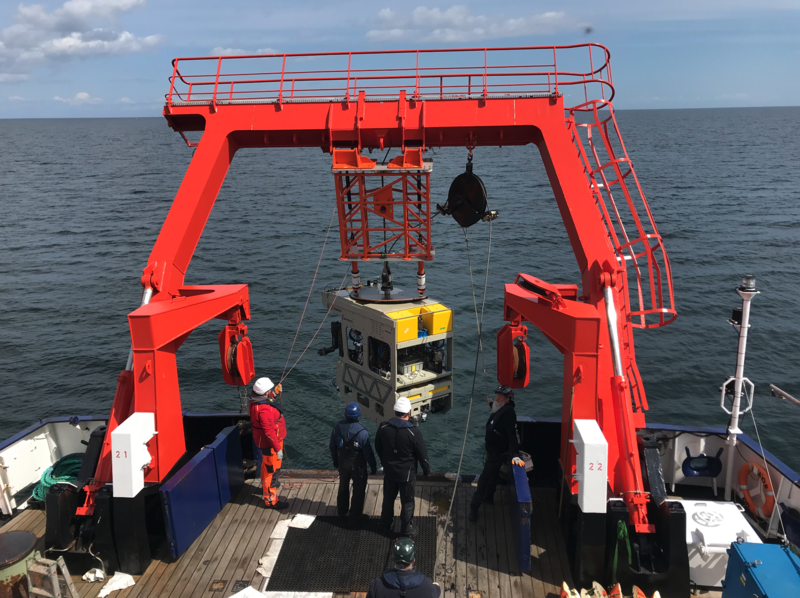
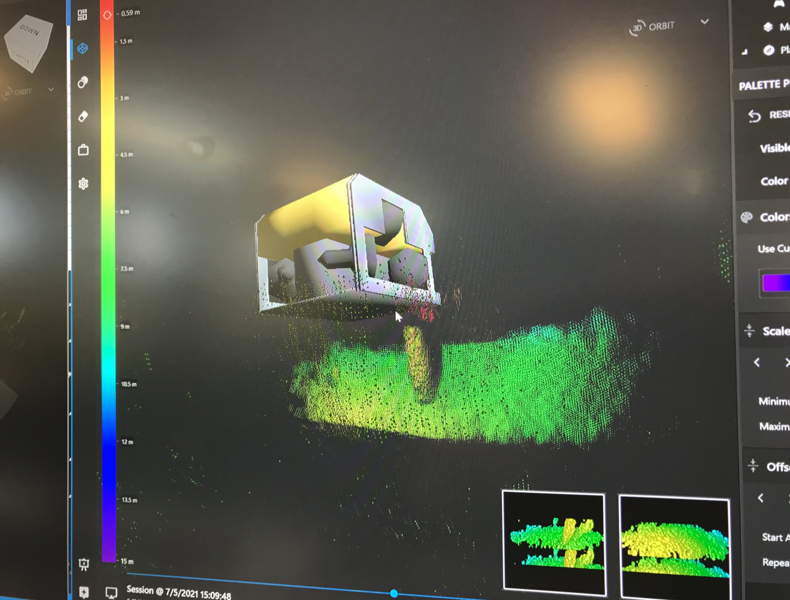
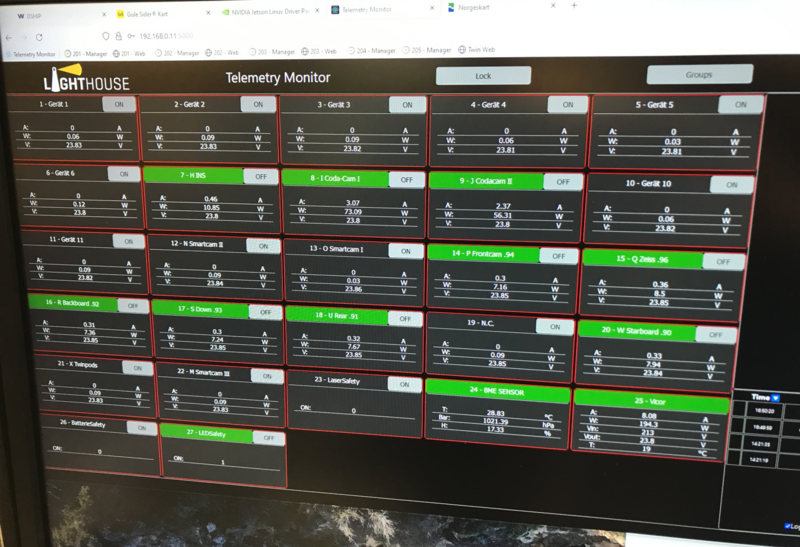
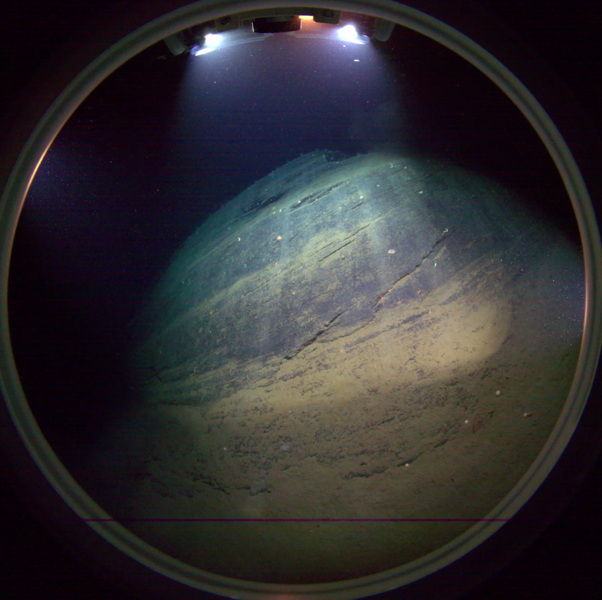
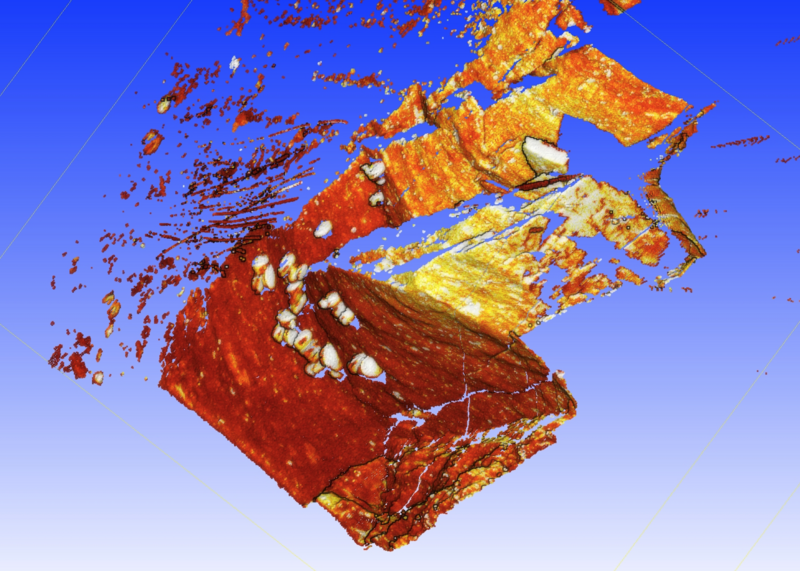
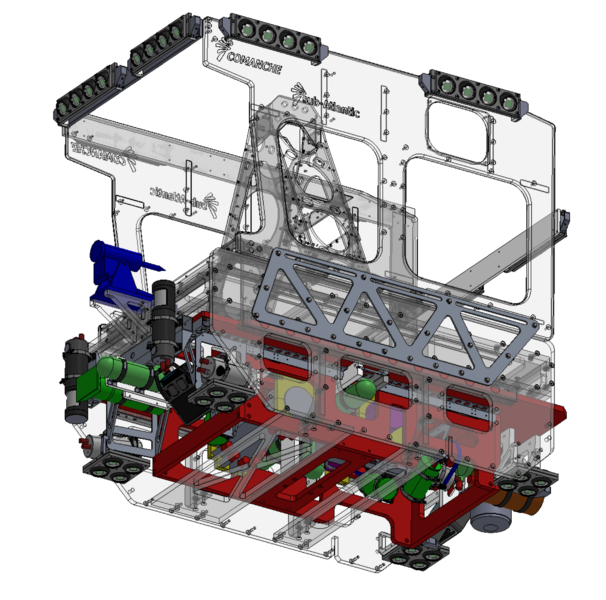
The goal of the Helmholtz-Validation-Fund Project LIGHTHOUSE (Budget 2.35M) is to create an integrated realtime-deep-ocean visualization system on the basis of existing or granted GEOMAR patents as well as leading commecial underwater sensors - so to say, the "Google Street View Car" of the abyss. It consists of a sensor package on the ROV that scans the entire surroundings based on optical and acoustic techniques (cameras, lighting, sonars, laser scanners). It then creates a real-time 3D terrain model from this data as well as a panoramic, stereoscopic, foto realistic view from a freely configurable perspective. The second component is a powerful real time visualization system which displays the data and metadata (navigation, sample points) on the vessel or back on shore via satellite link. We specifically target immersive technologies such as VR and AR. This software is being developed at the Systems & Control Innovation Lab of the DLR.
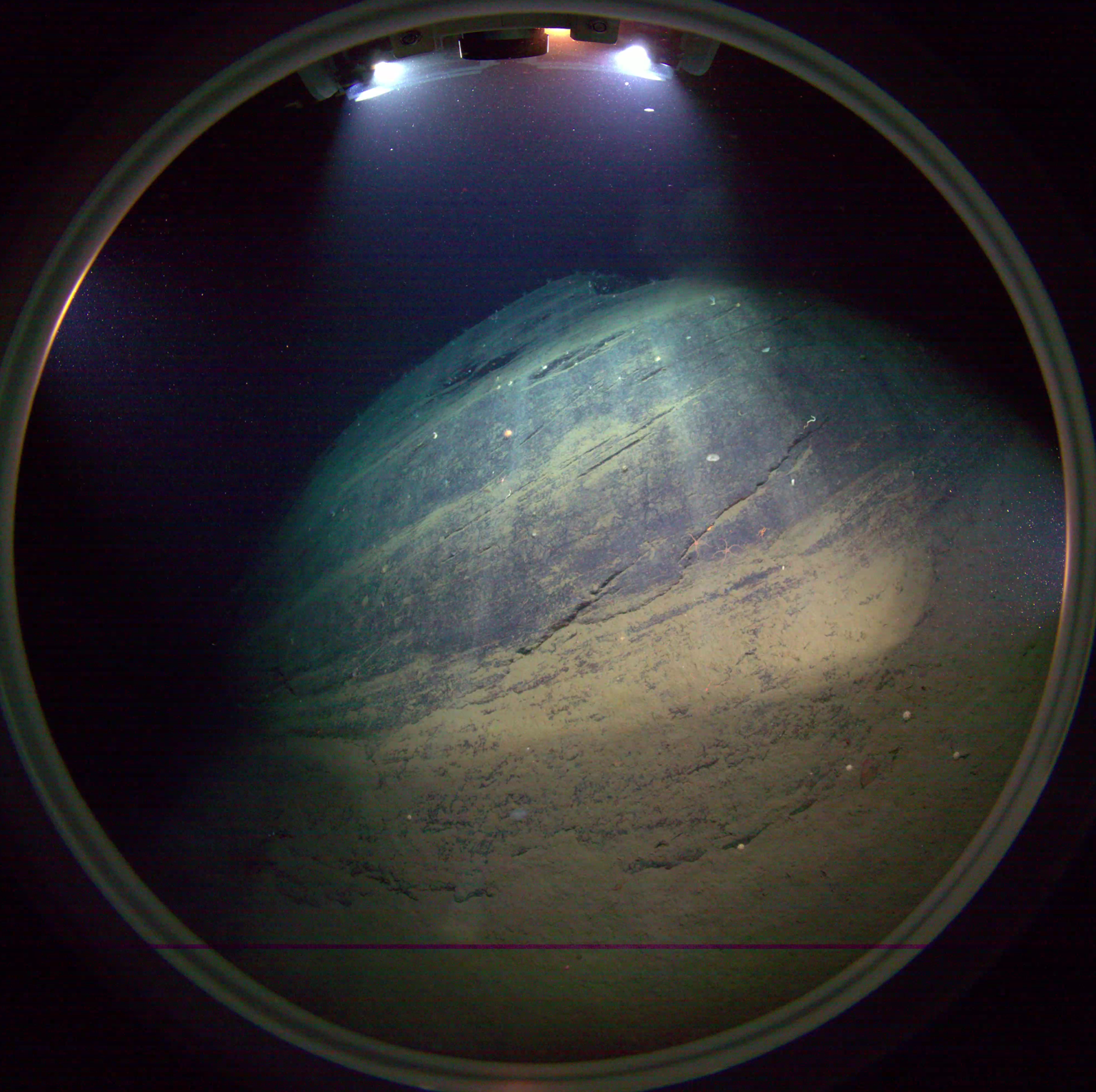
Several international offshore technology companies currently deal with this topic, but they do not offer a comparably well integrated solution. The application is directly transferable to the offshore industry (e.g., inspection tasks). A first successful deep water test was done in November 2021 in the norwegian Sognefjord at 1000m depth.