





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Wissenschaftliche Leitung
Dr. Tom Kwasnitschka
GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel
Wischhofstr. 1-3, Geb. 8e, Raum 213
24148 Kiel
Tel.: 0431 600-2136
Fax: 0431 600-2924
E-mail: tkwasnitschka(at)geomar.de

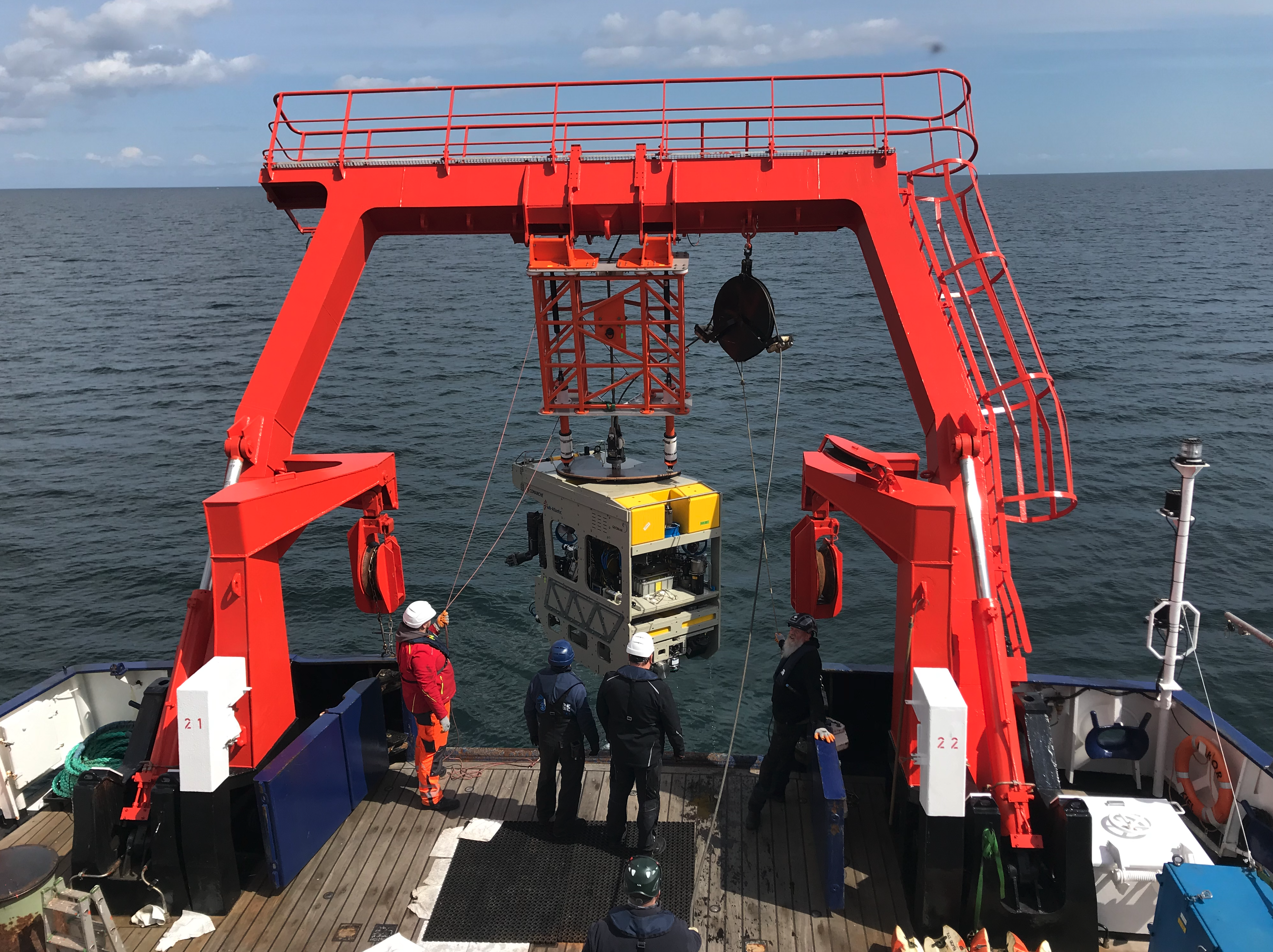
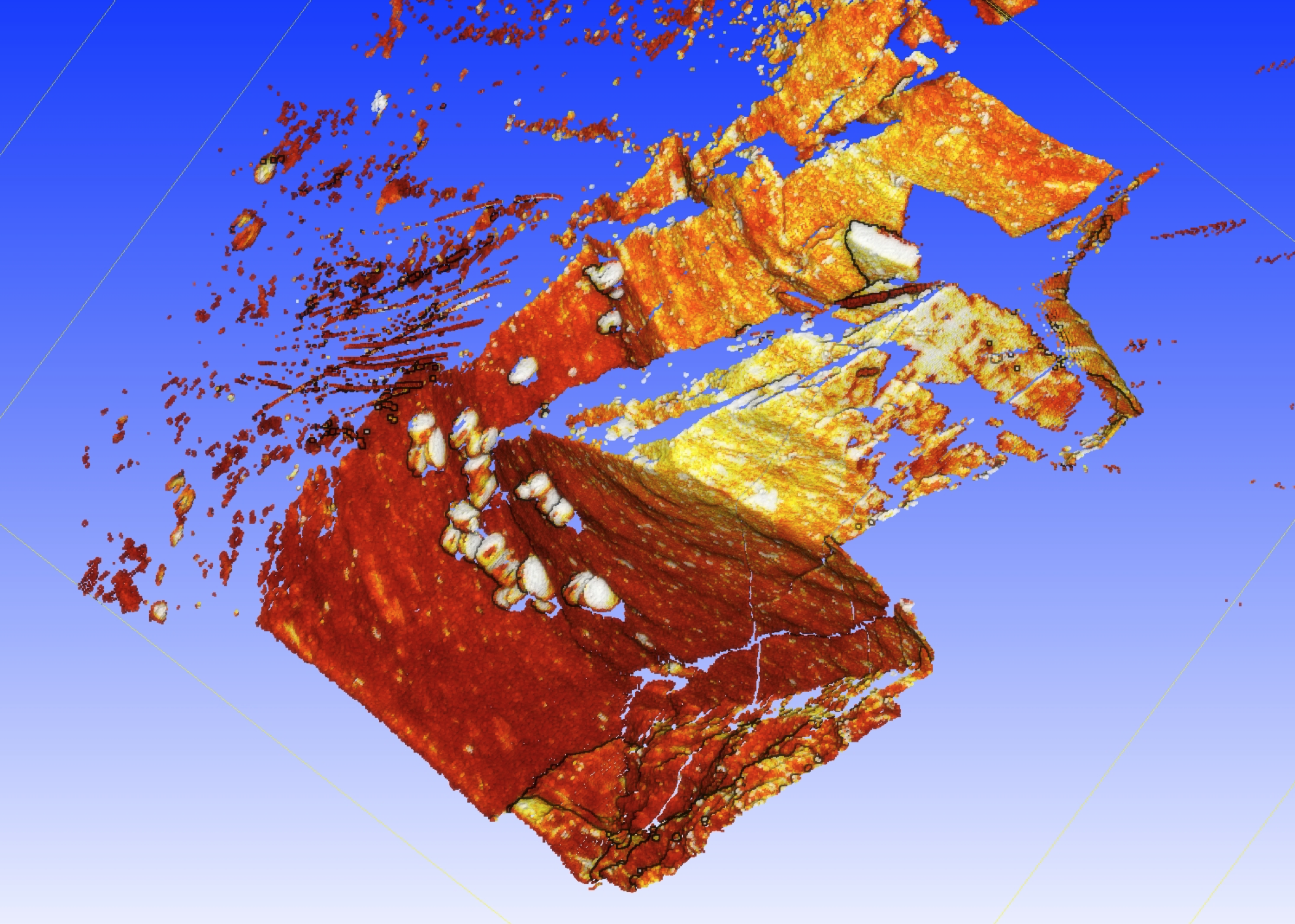
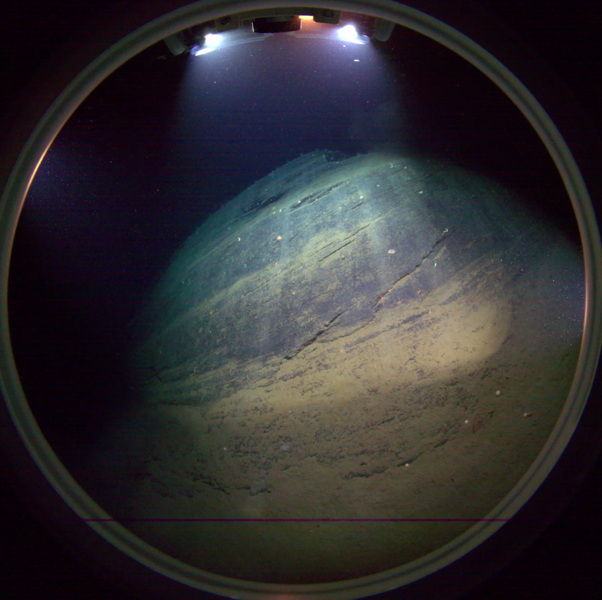
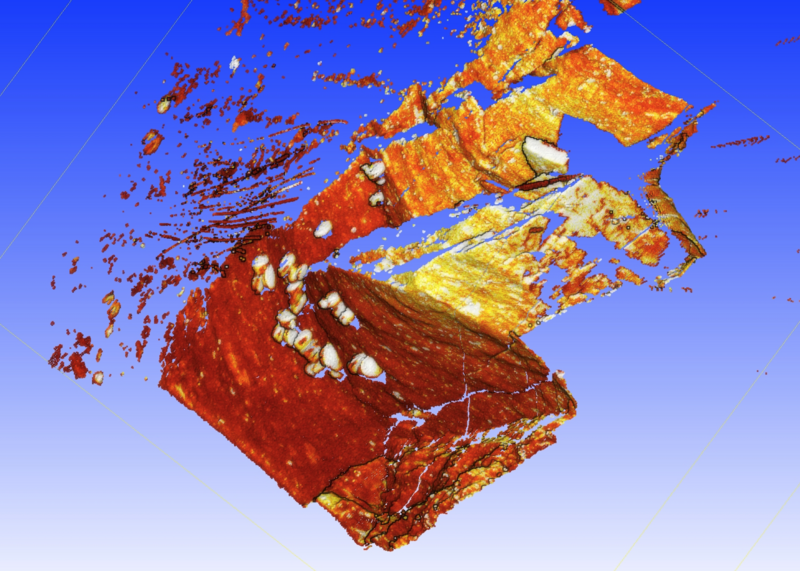
Robotische Tiefseeforschung hat ein Visualisierungsproblem: Die Umgebung, in der sich Tauchroboter (ROV, AUV) bewegen soll in Echtzeit kartiert werden, sowohl zum Zweck der Navigation als auch für wissenschaftlichen Erkenntnisgewinn.
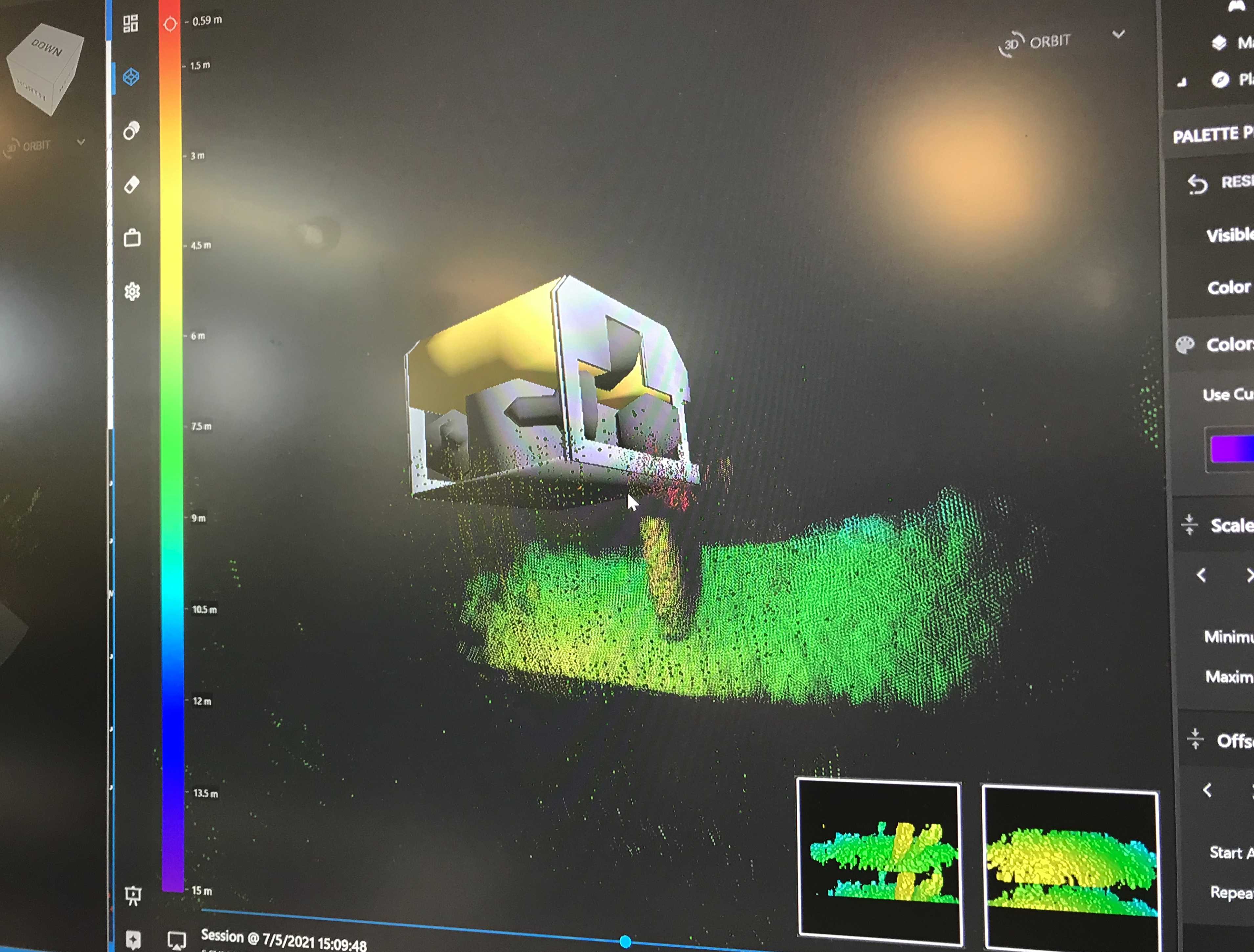
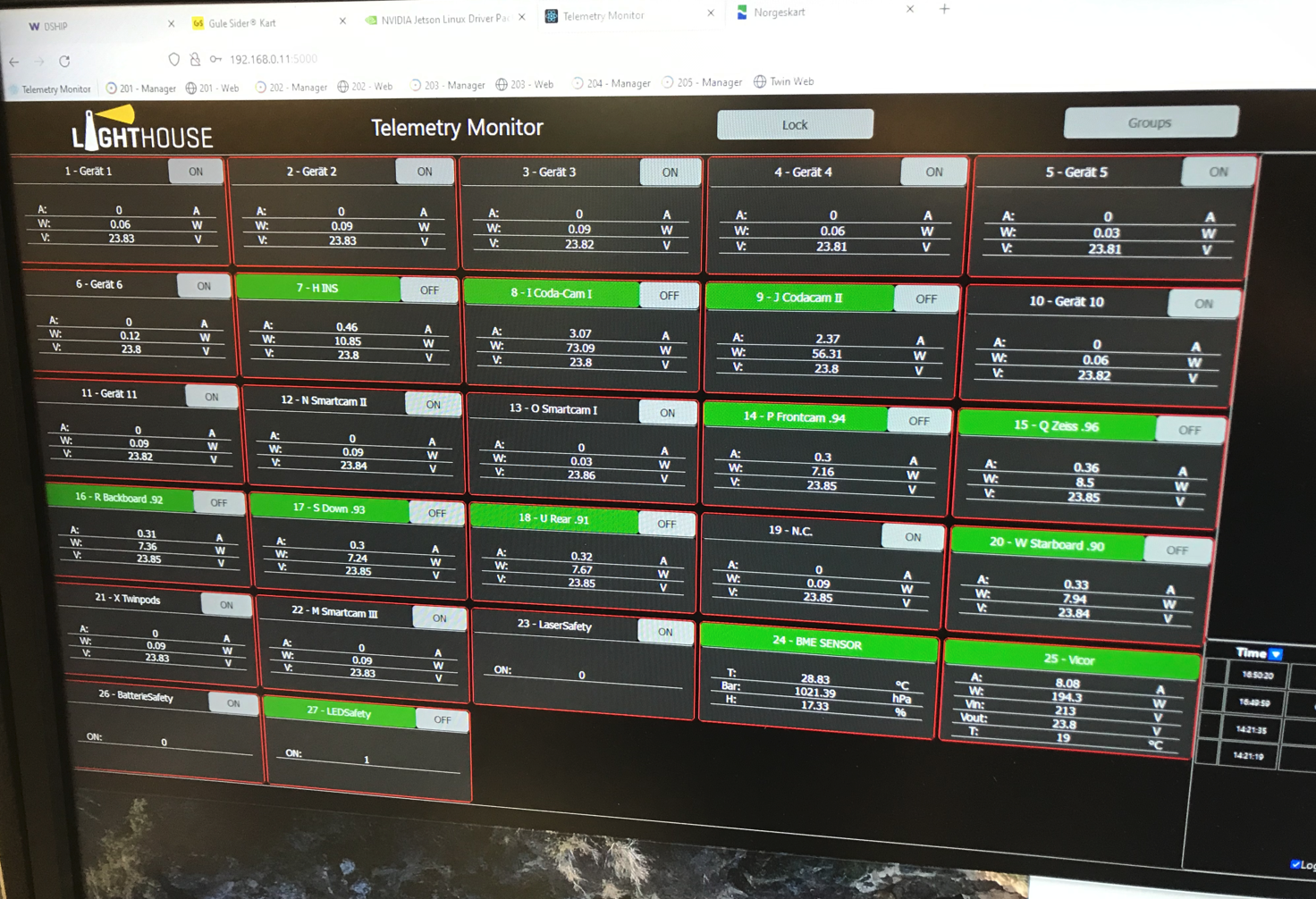
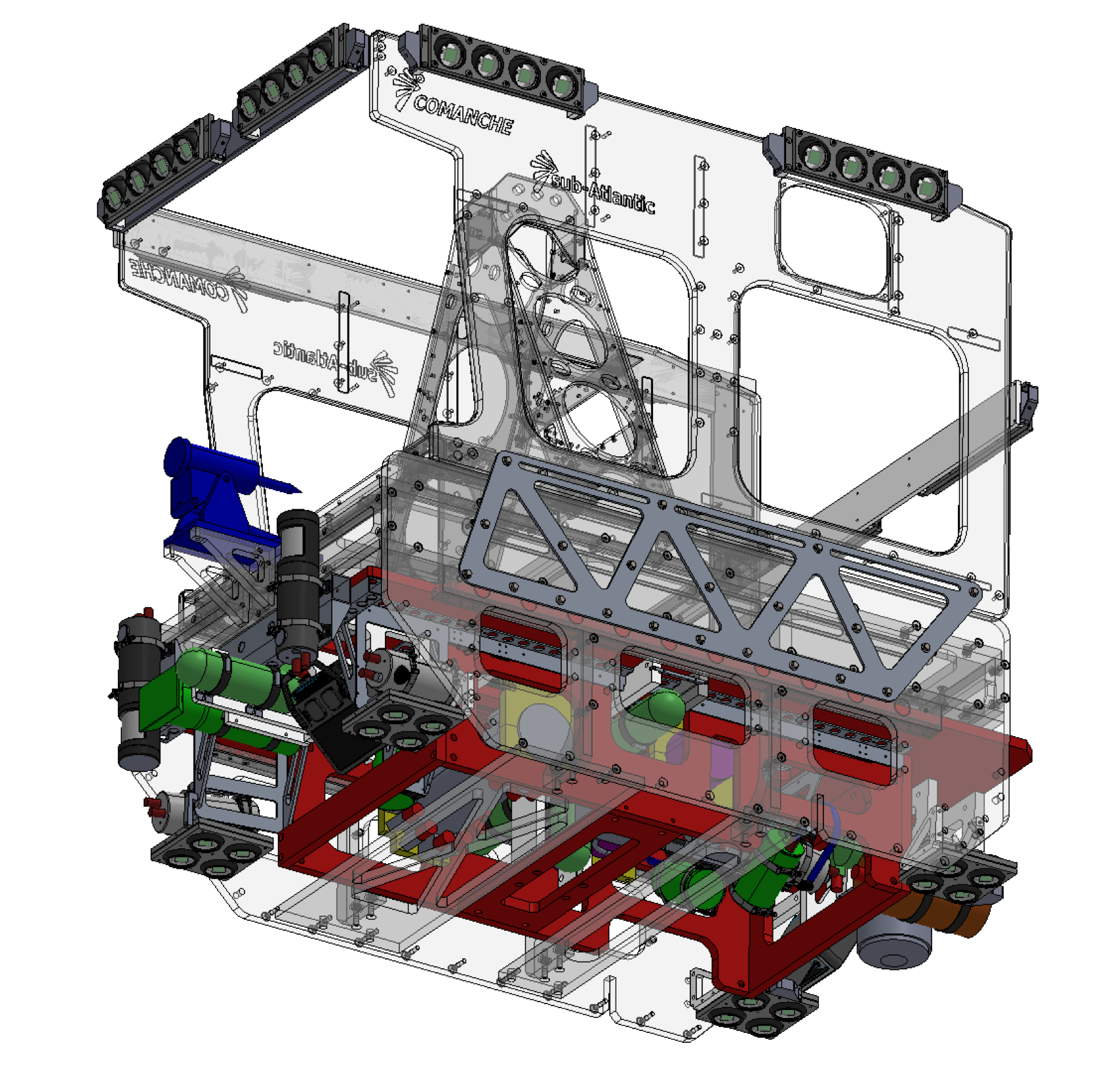
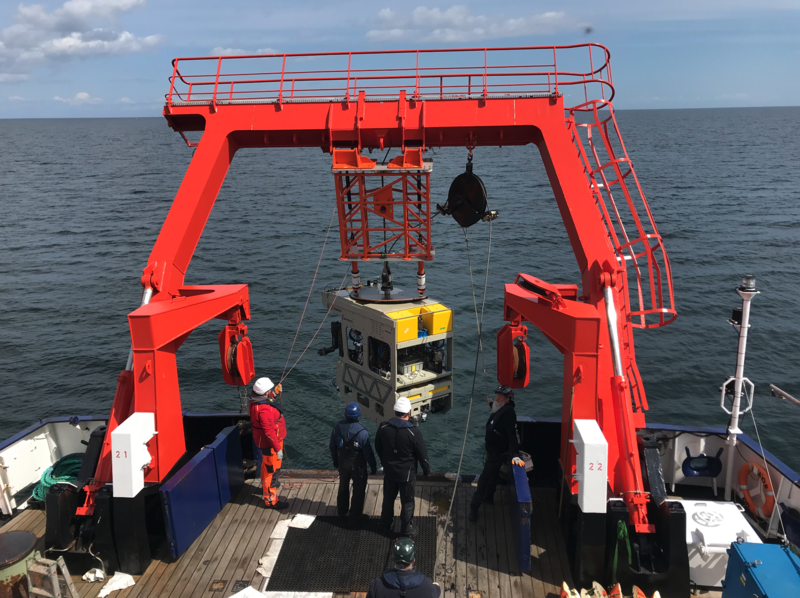
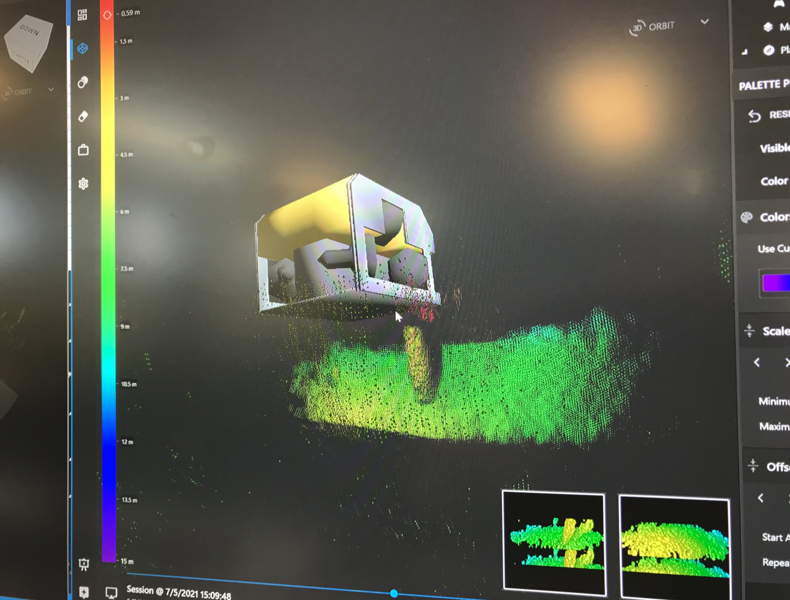
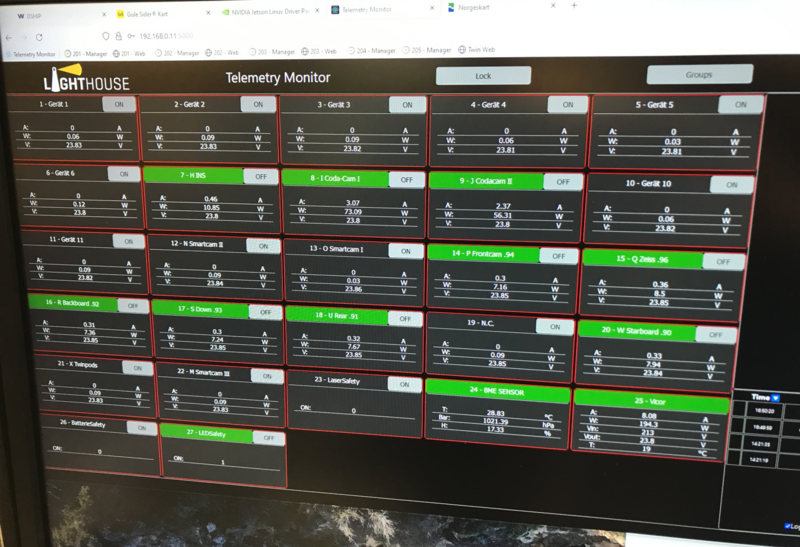
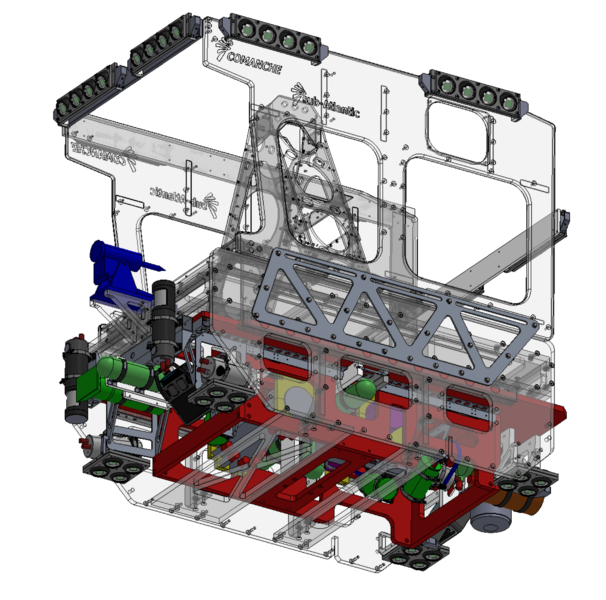
Ziel des Helmholtz Validierungsfonds-Projektes LIGHTHOUSE (Budget 2.35M€) ist die Schaffung eines integrierten Echtzeit-Tiefseevisualisierungssystems auf Basis bestehender oder beantragter GEOMAR Patente sowie führender kommerzieller Unterwassersensorik - quasi das "Google Street View Car" der Tiefsee. Dieses besteht aus einem Sensorikpaket auf dem Tauchfahrzeug, welches auf Basis optischer und akustischer Technologien (Kameras, Beleuchtungstechnik, Sonare, Laserscanner) die Umgebung in jeder Richtung scannt. In Echtzeit wird hieraus sowohl ein 3D-Geländemodell als auch eine panoramische, stereoskopische, fotorealistische Ansicht aus einer frei wählbaren Perspektive errechnet. Die zweite Komponente ist ein leistungsfähiges Echtzeit-Visualisierungssystem welches an Bord oder über Internet die gewonnenen Daten sowie Metadaten (Navigation, Probenpunkte) darstellt. Hierbei sollen gezielt immersive Technologien wie VR und AR zum Einsatz kommen. Diese Software wird vom Systems & Control Innovation Lab des DLR entwickelt.
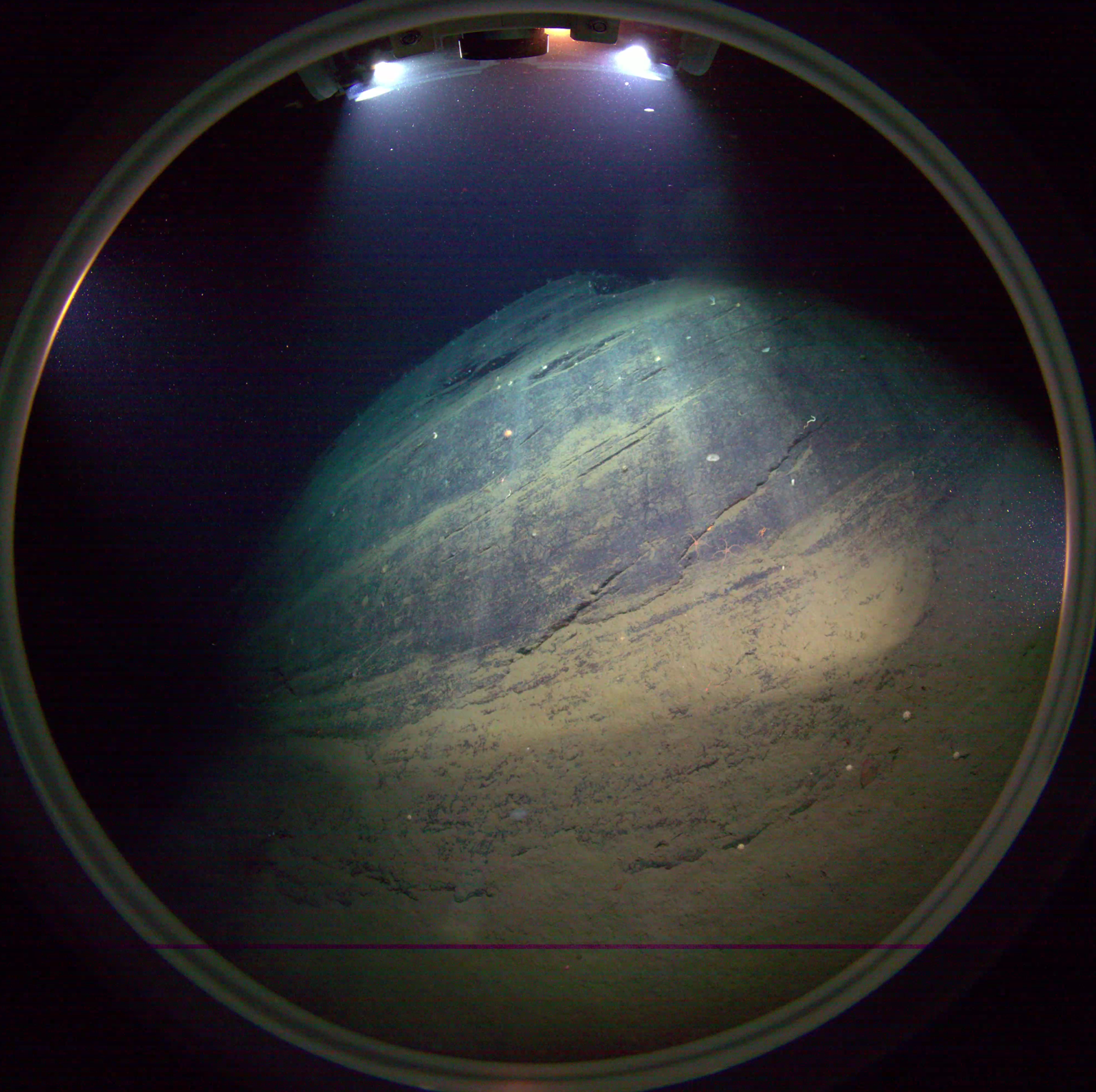
Mehrere internationale Meerestechnikfirmen beschäftigen sich derzeit mit dieser Thematik, bieten jedoch keine vergleichbar integrierte Lösung an. Die Anwendung ist direkt übertragbar auf Problematiken der Offshore-Industrie (v.a. Inspektion). Ein erster kompletter Tiefwassertest erfolgte im November 2021 im norwegischen Sognefjord auf 1000m Tiefe.